




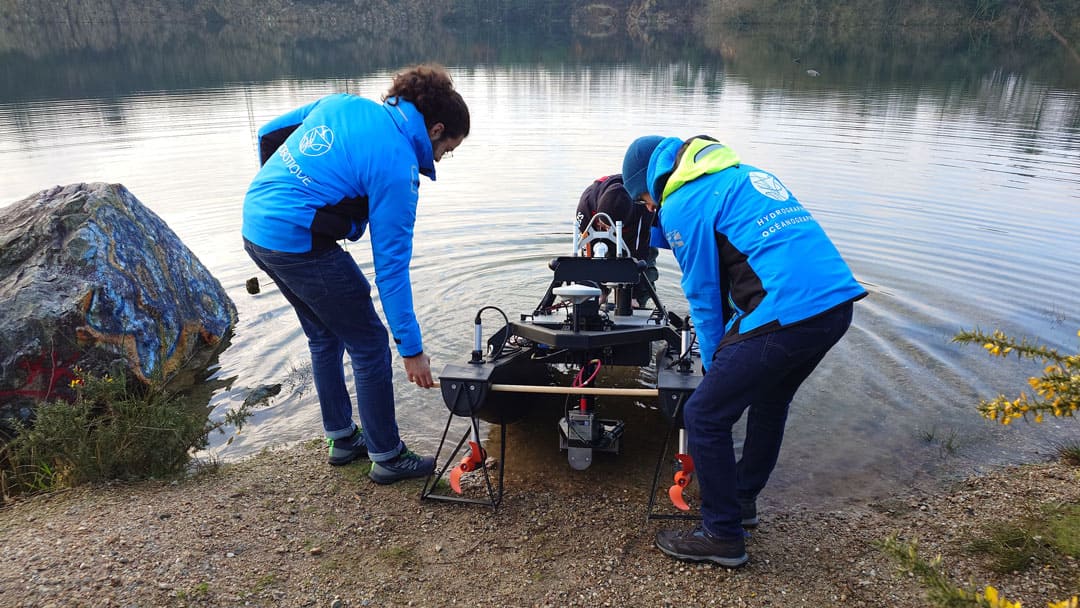
Acquiring bathymetric data close to shore or in shallow waters is a complex task when using conventional means. The draft of oceanographic vessels prevents them from getting too close to the coast, making it difficult to link land and sea data. To solve this problem, ENSTA's hydrography and oceanography teams acquired a new piece of equipment at the end of 2024: the USV Otter.
Financed as part of the ObsOcean project by the 2021-2027 State-Region plan contract, this floating robot complements the hydrographic equipment already available, such as their launch “Mélité”.
With this acquisition, we aim to step up the pace of automatic bathymetric surveying, particularly in coastal and hypercoastal areas, where the shallow waters (which can reach 0.5 m) make traditional bathymetric surveying impossible. An autonomous system facilitates long missions without human intervention for a reasoned acquisition cost,
explains Pierre Bosser, teacher-researcher in hydrography at ENSTA /Lab-STICC.
The planned uses are numerous: the robot will serve as an educational tool for training student engineers hydrographers and roboticists. It will also benefit from research activities carried out on the Brest campus.
The use of this new equipment will contribute to several research areas of the Lab-STICC's AI & Ocean cluster, such as spatio-temporal bathymetry monitoring (dune dynamics, presence of objects), estimation and automatic correction of systematic errors, real-time quality control of measurements, monitoring of accretion areas (sediment models) and acoustic/laser data fusion.
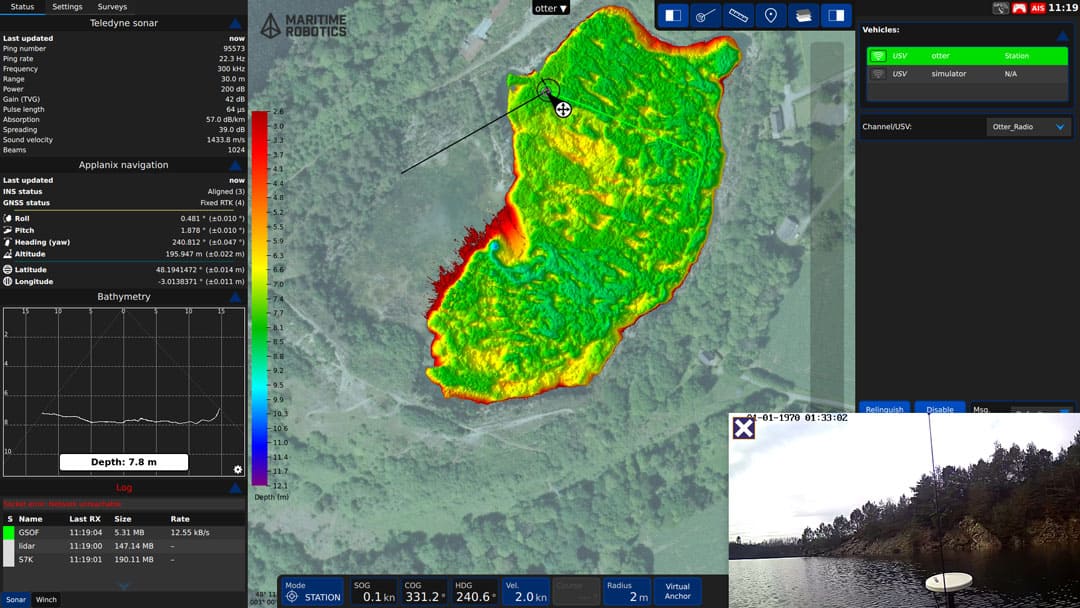
Ultimately, the aim is to have a fully autonomous operational system for seabed perception. This USV will be equipped with its own high-resolution bathymetric system (compact multibeam echosounder) and an electric winch for on-site measurements of the entire water column (sound velocity, temperature, salinity, etc.). This new equipment will be modular, with the possibility of adding complementary sensors such as side-scan sonar for acoustic imaging of the seafloor or topometric Lidar to scan the land-sea interface,
explains Pierre Bosser.

Trials were recently carried out on Lac de Guerlédan. They enabled us to evaluate the drone bathymetric Lidar from Yellowscan, for a reference bathymetric survey in an area where the usual heavy equipment could not be deployed.
Applications are already scheduled for the coming weeks, with the aim of mapping wrecks and relics (with the LETG laboratory) and measuring the sea surface to calibrate/validate space altimetry observations (with the LOPS and LIENSs laboratories).
Financeurs du CPER 2021-2027






























































































































