




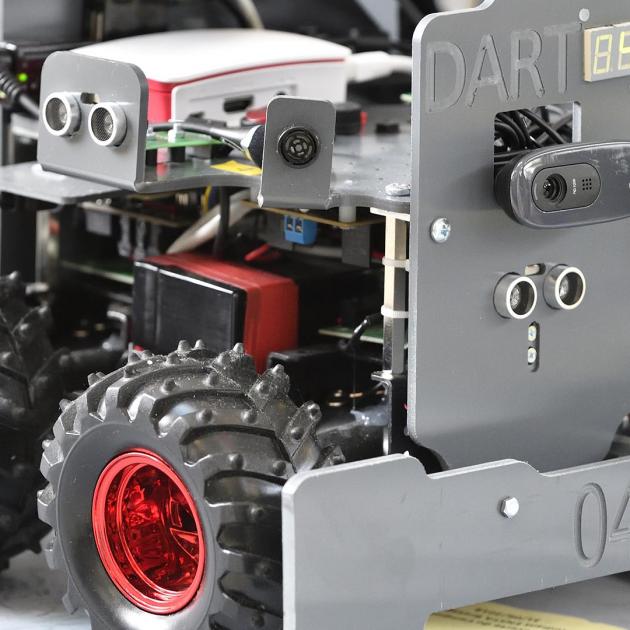
DESIGNING AUTONOMOUS DRONES FOR A WIDE RANGE OF MISSIONS AND ENVIRONMENTS (SEA, LAND AND AIR).

Robotics is a field of the future that reflects the multidisciplinary nature of ENSTA Bretagne.
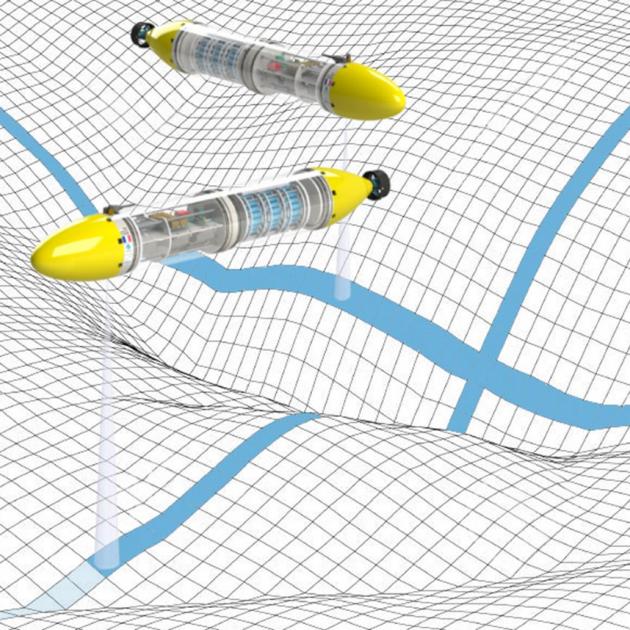
Research at ENSTA Bretagne delves more particularly into the challenges of autonomous, mobile and underwater robotics: how can the robot be located? Monitored? How can a fleet of robots be coordinated? … in complex environments like the marine setting.
Multidisciplinary skills need to be brought together to tackle the issues encountered. On the one hand, physics of the marine environment, sensors, design of mobile platforms and programming are required to design robots. On the other, localization and control algorithms enable creation of their embedded intelligence.
The multiple scientific challenges involved in this work (robot autonomy, coordination, stealth, etc.) form the basis of numerous research projects at ENSTA Bretagne, for which it partners with innovative small businesses and corporations in France and abroad.
Program strengths
Prizes and international recognition
- 1st prize in the 2016 European Student Autonomous Underwater Vehicles Challenge (SAUC-E)
- 1st and 2nd prize in the World Robotic Sailing Championship (2018, 2015, 2014 and 2013)
- 7th prize in the 2015 European euRathlon competition for a project that involved several robots to carry out missions in hostile environments
Prix Moore
- In 2012, Luc Jaulin, an ENSTA Bretagne research professor, received the R.E. Moore Prize for Applications of Interval Analysis for his work on autonomous robotics.
The Guerlédan project: field experimentation for robotics students and hydrographers
Every year, hydrography and robotics majors visit the artificial lake at Guerlédan dam to carry out joint experiments in the field.
The program
Julien Ogor
"Diplôme d'ingénieur" (i.e. MSc in Eng.) program, Autonomous Robotics major
- Learn more about the Autonomous Robotics major offered in our "diplôme d'ingénieur" program (equivalent to an MSc in Engineering): a 3-year syllabus for BSc or equivalent graduates, or a 2-year program for 1st-year Master's graduates
- Admission
Parcours de 4e année pour élèves Polytechniciens
Cette spécialité est offerte aux élèves Polytechniciens dans le cadre de leur 4e année.
- Découvrir ce parcours en robotique mobile
PhD Program
- a 3-year program for MSc degree holders
- Enrollment in ENSTA Bretagne and affiliation with the SPIN doctoral school and Lab-STICC (Joint Research Center 6285 of the CNRS)
Research
Simon Rohou
Research topics
Algorithm development for autonomous mobile robots used in physical environment perception (especially in marine environments) on both axes of the perception-action loop:
- Action in an uncertain and unstructured environment: Robust control, localization and planning (sensors, robots) through interval analysis, organization of drone swarms.
- Dynamic perception: Processing spatially and temporally distributed data, characterizing the environment and its uncertainty, capitalization.
The Lab-STICC laboratory
- Lab-STICC is a CNRS joint research center (UMR 6285) with 600 members from ENSTA Bretagne, IMT Atlantique, ENIB, UBO, UBS and CNRS.
- ENSTA Bretagne is the third most important contributor to this shared lab
Examples of projects and theses
- Robust, accurate and reliable localization of underwater robots
- Securing an area with robots
- Controlling underwater drone swarm
contact
Luc Jaulin
Full professor
IT Departement
Lab-STICC Laboratory / AI & Ocean Department / Robex Team
+33 (0)2 98 34 89 10
contact
Fabrice Le Bars
Associate professor in robotics
IT Departement
Lab-STICC Laboratory / AI&Ocean Departement/ Robex Team
contact
Admissions Coordinator (French students)
Adelaïde Gaudron
+33 (0)2 98 34 87 01
Our partners






























news



