



5 thesis defenses are scheduled at ENSTA Bretagne in December, in the field of information and communication science and technology. They will take place by videoconference.
Monday December 7th at 9 a.m.: Ghattas Akkad’s thesis defense
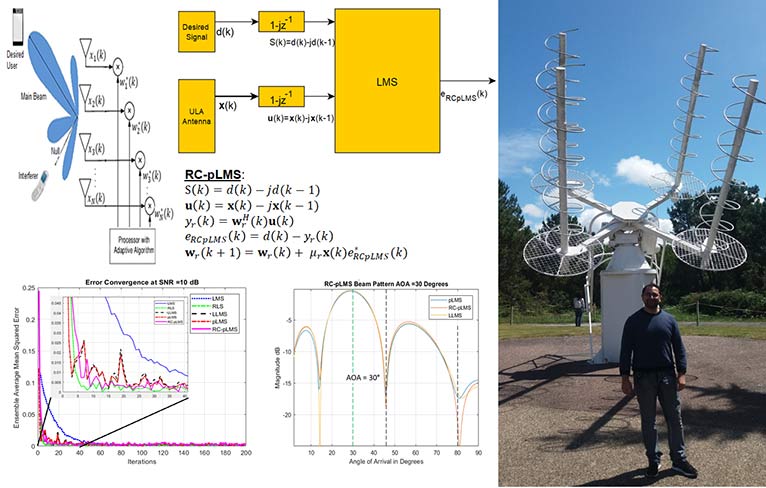
A Reduced Complexity Parallel Least Mean Square Algorithm for Adaptive Beamforming
Abstract: Ever since its inception, adaptive beamforming has become an inevitable feature in smart antenna array to improve the spectrum efficiency. However, modern embedded wireless communication systems have imposed Monday December 7th at 9 a.m.: Ghattas Akkad’s thesis defensechallenging constraints on adaptive algorithms when targeting a parallel and pipelined implementation on limited resource devices, like Field Programmable Gate Array (FPGA). Such constraints include reduced complexity, parallelism, accelerated convergence and low residual error. Several variants of classical adaptive beamformers were proposed to accelerate the convergence while maintaining a low error floor. Other suggestions focused on a parallel, pipeline architecture. The resulting beamforming algorithms either presented an improved convergence profile, at the cost of an increase of complexity or presented a pipeline hardware architecture without any significant improvement. To present a unified solution with superior convergence profile while maintaining a low complexity parallel pipeline architecture, we propose a two-stages algorithm, called parallel least mean square structure (pLMS). pLMS is further simplified to obtain the reduced complexity pLMS design (RC-pLMS). In order to design a pipelined hardware architecture, we applied the delay and sum relaxation technique (DRC-pLMS). A study on the behavior and the performance of different hardware design tools and processor architectures is conducted. Computer simulations demonstrated the outstanding performance of RC-pLMS. The DRC-pLMS can operate at a maximum frequency of 208.33 MHz with a minor increase in resource usage compared to LMS.
Monday December 7th at 9.30 a.m.: Antoine d'Acremont’s thesis defense
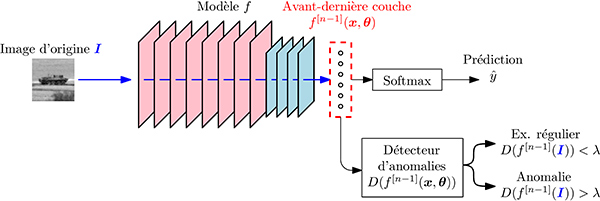
"Deep neural networks for classification of objects in infrared imaging: contributions to learning based on synthetic data and detection of anomalies"
Abstract: Performances of deep-learning techniques, convolutional neural networks (CNNs) in particular, are conditioned by the size and quality of training databases. In a context such as identification of military vehicles in infrared mages, it is difficult to constitute such learning bases. To remedy this, it is possible to use simulations in order to generate data sets. However, state-of-the-art architectures perform poorly at generalizing on real data after being trained on simulated data. In this thesis, we propose a special convolutional neural network called cfCNN, which enables obtainment of better performances than the state-of-the-art models we have tested. We assume that the images to be presented to it will come from a detection module that may be imperfect.
Therefore, we assess the cfCNN’s robustness in the face of the target’s translations and changes in scale in the input image. In the face of these disruptions, the cfCNN demonstrates better robustness compared with state-of-the-art convolutional neural networks.
In order to increase confidence in the cfCNN’s predictions, we propose a classification anomaly detection module, based on the Local Outlier Factor. This approach produces good performances on homogeneous training and test data.
However, it performs less well on problems of transfers between simulated and real data. In order to compensate this drop in performance, we propose a cascade architecture that exploits information coming from different layers of the cfCNN.
Open configuration options.
Wenesday December 9th at 10 a.m.: Valentin Besnard's thesis defense
Thesis completed in collaboration with ESEO, ENSTA Bretagne, Lab-STICC and Davidson Consulting’s R&D Department.
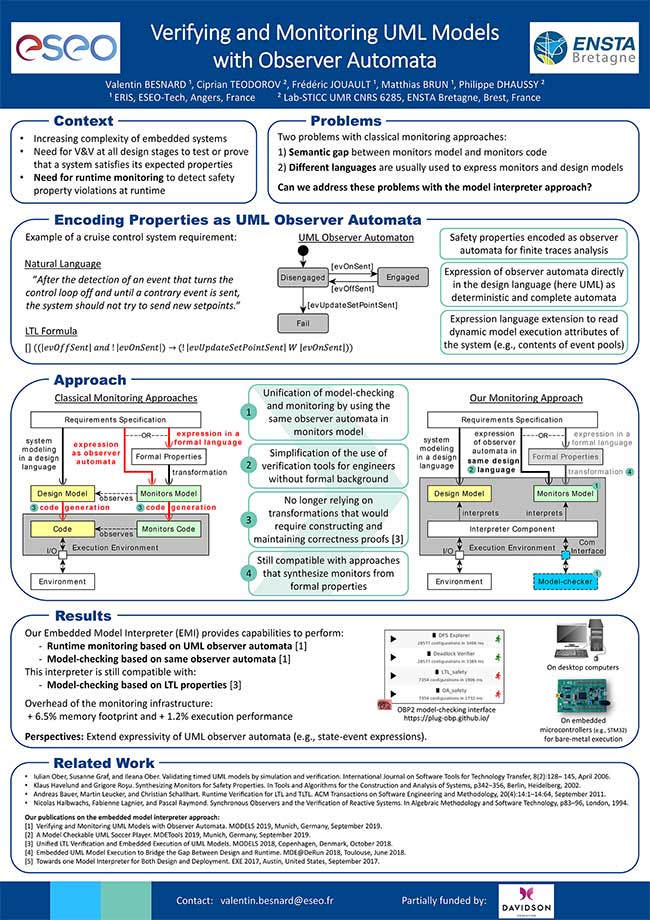
"EMI: an approach to unifying analysis of embedded execution with the help of a controllable model interpreter"
Abstract: The growing complexity of embedded systems exposes them to software bugs, design errors and security breaches. Consequently, there is ever greater need for verification and validation. In order to execute and analyze models of such systems, transformations are usually necessary for obtainment of (i) the executable code that can be deployed on an embedded target, and (ii) analysis models enabling application of formal verification techniques (e.g. model-checking). However, such typically unproven transformations cause semantic gaps and require establishment of equivalence between the executable code and the analysis models so as to ensure that what is executed is really what has been checked. In order to unify the activities of analysis and embedded execution of models, the EMI approach is based on a controllable model interpreter enabling use of a single couple (model + semantic) for all software development activities. In order to assess the approach, a UML model interpreter was designed and applied to different embedded system case studies in order to implement various analysis activities (e.g. simulation, animation, debugging, model-checking and monitoring).
Tuesday December 15th at 2 p.m.: Ngoc-Tan Truong's thesis defense
“Multisource hybridization for improvement of detection, tracking, location and positioning functions in difficult environments”
Abstract: Services connected with GNSS positioning systems have developed considerably over the last ten years and continue to gain in popularity and efficacy. Other services have been rolled out in various activity fields and sectors; as regards maritime applications, it is estimated that around 87% of the merchant navy already used the global satellite system for navigation and positioning. These days, with the arrival of the new Galileo and Beidou systems and modernization of the GPS and GLONASS systems, new satellites, along with numerous new frequencies and new signals are opening the door to countless new applications. Certain applications now require greater precision and use of navigation systems, above all in difficult environments. A great many factors affect a GNSS receiver’s final performances. Some of them are connected with the receiver’s and its antenna’s inherent quality (sensitivity, signal processing quality, resistance to interference and jamming, etc.), while others are connected with the atmospheric layers that signals cross and yet others with the receiver’s reception environment. Sources of interference in the reception environment (mask, multi-paths, diffraction, etc.), including the dynamics of moving objects, have significant effects on the receiver’s performances.
All the work carried out was in this context.
Hence, the work carried out in the context of this thesis sought to develop new algorithms with multisource hybridization in order to improve detection, tracking, location and positioning functions in difficult environments. Use of multiple signals has advantages and disadvantages alike, as they may include poor quality signals that have a negative impact on the accuracy of a position. We have therefore studied and presented different methods enabling reduction and/or elimination of aberrant data: Iterative Reweighted Least Squares (IRWLS) and Robust Extended Kalman Filtering (REKF). We applied the REKF method using a combination of GPS, Galileo and GLONASS data from the ABMF base station (GNSS reception station in Guadeloupe managed by Météo-France). This enabled us to improve position accuracy considerably, by about 84% compared with a non-robust combination of data (using the Least Squares method). Although the REKF method enabled improvement of position accuracy, results obtained may contain errors that are difficult to estimate. Consequently, and in order to take account of this defect, we studied, presented and applied another, very powerful method known as LSTM (for Long Short Term Memory). LSTM is an artificial recurrent neural network (RNN) architecture used in the field of deep learning to make certain types of predictions (based on time series, etc.). The combination of the REKF and LSTM (deep learning) techniques enabled us to improve the accuracy of a receptor’s positioning significantly: by about 95% compared with the non-robust combination of data from the ABMF base station.
It should be borne in mind that GNSS is not the only technology used to determine a receiver’s position and speed. In cases where GNSS signals are blocked and/or unusable, we combined and merged GNSS data and data from Inertial Navigation Systems (INSs), a solution which is a good alternative for determination of the receiver’s position.
The work on this thesis was carried out in the context of the ePANEMA project, supported as part of ADEME’s Investment for the Future Program (PIA). It was carried out in partnership with other members of the consortium (SAFRAN SE, Diades Marine and ENSM).
Wenesday December 16th at 2 p.m.: Antoine Foucault's thesis defense
“Detection of LPI radars”
The emergence and widespread use of LPI (Low Probability of Intercept) radars represent a threat to naval vessels (frigates, aircraft carriers, etc.) as they are unable to track them with their own radar or using an Electronic Support Measure (ESM) spectrum listening system. This thesis aims to propose new detection methods adapted to LPI radars and which enable estimation of parameters of interest for identification of such radars. The study’s context is defined, explaining a radar’s LPI criterion compared with usual ESM architecture and choosing the LPI signals to be processed. Three detectors are proposed, each using a different approach.
The first revisits the classical ESM approach consisting of integrations of shorter duration than the radar pulse. The interest here is the ability to reconstruct the pulse in a time-frequency representation enabling the desired estimations to be made. The proposed procedure reconstructs the pulse using geometric methods combined with elementary optimal pre-detection in the context of a time-frequency analysis. The second detector analyzed, based on cyclic autocorrelation, integrates over much longer durations than is usually the case. We show that it is suitable for several types of LPI signals of interest. The third detector is an adaptation to ESM problematics of a detector recently proposed in the field of communication and radar, based on the random matrices theory. It enables use of MUSIC methods for estimation of direction of arrival and frequency.
Useful links














