







Équipe PIM - Propagation et interactions multi-échelle
Cette équipe du laboratoire Lab-STICC axe ses recherches sur le développement et l'amélioration des outils de modélisation et d’optimisation pour l’aide à la représentation et à la compréhension de phénomènes issus de l’interaction des ondes électromagnétiques avec l’environnement. Ces phénomènes sont observés à différentes échelles, du matériau au système.
Ces recherches visent notamment à intégrer davantage «d’intelligence» dans les systèmes d’acquisition et d’exploitation des observations issues de systèmes de type radar (aéroporté ou satellite) ou de géolocalisation de type GPS.
Applications
Radar ; guerre électronique ; géolocalisation et navigation ; pollution en mer ; surveillance, sécurité et sûreté maritime ; télé détection micro-onde ; reconnaissance de cibles (à partir de signaux/images radar).
Thèmes et compétences
- Modélisation et simulation électromagnétique multi-échelle, multi-physique.
- Propagation et interaction des ondes avec l’environnement (mer, atmosphère, terre).
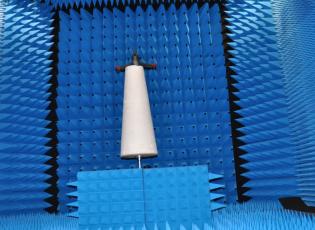
- Modélisation et simulation des systèmes hyper fréquences (bilan de liaison, télédétection micro-onde, expérimentation…).
ENSTA Bretagne contribue aux programmes de recherche suivants
Projet e-PANEMA : e-Positioning et Aide à la Navigation en Environnement Maritime
Objectif : étudier et maquetter les briques technologiques innovantes pour accroître la sécurité et l’efficacité de navigation des navires civils.
- Partenaires : ENSTA Bretagne/Lab-STICC, SAFRAN, Diades Marine, ENSM ;
- Financeur : ADEME (investissement d’avenir « navires du futur »).
Projet SLERECIM
Ce projet porte sur l'estimation de la signature de cibles navales complexes en mer (apport de SFG et LFG : Sommation et Lancer de Faisceaux Gaussiens).
- Financeur : DGA.
Projet CEPAMOCS
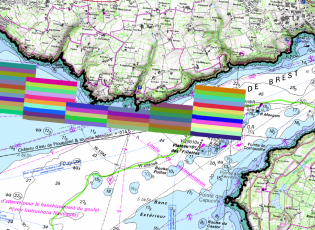
Le projet CEPAMOCS porte sur la Caractérisation et l'Extraction de PAramètres d’une surface de Mer hétérogène Observée par différents Capteurs Satellites).
- Financeur : DGA.
Projet SYMOC : SYstème Mobile d’Observation et d’aCquisition
Dans le cadre du projet SYMOC, l'ENSTA Bretagne a fait l'acquisition de matériel (CPER1 SOPHIE : STIC & Ondes, et Photonique). Il s'agit :
- de modules UP/DOWN converter permettant la transposition en fréquence des signaux émis et reçus;
- d'antennes large bande permettant de couvrir l’ensemble des fréquences utilisées.
contact
Ali Khenchaf
Enseignant-chercheur au Département STIC
Laboratoire Lab-STICC / Responsable du pôle SyPH / équipe PIM
Directeur adjoint de l'école doctorale SPIN
+33(0)2 98 34 88 45


Equipe MOCS - Méthodes et outils pour la conception de circuits et systèmes
Les travaux de recherche de l'équipe MOCS du laboratoire Lab-STICC portent sur le développement d'approches méthodologiques de haut niveau basées sur la modélisation des systèmes selon différents points de vue, pour capter le comportement, les propriétés et les paramètres essentiels. Les objectifs sont de simuler et de vérifier formellement le fonctionnement des systèmes.
L'équipe travaille sur des méthodologies basées sur la fédération de modèles hétérogènes ainsi que sur des méthodologie et passage à l’échelle des techniques de vérification formelle par modèle checking : systèmes prouvés corrects par construction.
Les autres axes de recherche sont centrés à la sécurisation du flot de compilation pour les circuits reconfigurables et sur la virtualisation d’architectures reconfigurables pour la conception de systèmes sur puce (SoC) pérennes et sécurisés.
Compétences :
- Techniques de modélisation et de simulation.
- Langages de programmation et leur sémantique
- Techniques formelles de vérification des exigences
- Techniques de virtualisation et de programmation de matériel reconfigurable
- Sécurité des systèmes et cyberdéfense
ENSTA Bretagne contribue aux programmes de recherche suivants
EASE4SE
Fédération de modèles exécutables pour la simulation opérationnelle de systèmes défense. Collaboration avec la société Sodius.
VeriMoB
Exécution et vérification formelle de modèles de systèmes de systèmes développés avec le cadre architectural de l’OTAN (NAF). Collaboration avec la société PragmaDev.
Sécurisation d’architectures Overlay
Sécurisation d’architectures Overlay pour un maintien en condition opérationnelle long de circuits numériques (étude école).
contact
Ciprian Téodorov
Enseignant-chercheur
Département STIC
Laboratoire Lab-STICC (UMR CNRS 6285) / Pôle SHARP / Equipe P4S
+33 (0)2 98 34 89 53

Equipe COM "Communication numérique"
Cette équipe du Lab-STICC s’intéresse aux méthodes statistiques et aux algorithmes de traitement de signal. Elle les applique à la télécommunication, à la guerre électronique, à la robotique, aux systèmes embarqués, à l’internet des objets et aux applications bio médicales, en se focalisant sur la radio-cognitive et l’antenne intelligente.
Applications
- Médecine
- Agriculture intelligente
- Internet des objets
- Guerre électronique
- Robotique
- Télécommunications, formation de voies (beamforming)
Compétences
- Méthodes aveugles de traitement du signal.
- Spectrum Sensing.
- Radio Cognitive.
- Théorie de jeux.
- Transmission sans fil.
ENSTA Bretagne contribue aux programmes de recherche suivants
Applications médicales , en relation avec l’hôpital des armées et le CHRU, à Brest :
- Acquisition et traitement des électrocardiogrammes d’un foetus et de sa mère à l’aide de capteurs sans fil.
- Caractérisation et classification de thrombose veineuse profonde (caillot sanguin, figure 1) .
- Utilisation des signaux EEG (électroencéphalographie) et EMG (électromyogramme) pour contrôler une chaise roulante par une personne paraplégique.
Utilisation des signaux EOG (électro-oculographie) pour actionner et surfer sur une page web par une personne paralysée
- Estimation de la volumétrie d’une partie du corps à l’aide d’une caméra 3D.
- Réaliser un capteur ECG sans fil.
- Réaliser un simulateur pour la faculté de médecine.
- Cartographie 3D des veines.
contact
Ali Mansour
Enseignant-chercheur
Département STIC
Laboratoire Lab-STICC / Pôle T2I3 / Equipe SI3
+33 (0)2 98 34 87 88
Equipe PRASYS "Perception, Robotique, Autonomous SYStems"
Les activités de cette équipe du Lab-STICC (UMR CNRS 6285) se concentrent sur le développement d’algorithmes pour les robots autonomes mobiles de perception de l’environnement physique.
La réalisation de tels systèmes repose sur la maîtrise de trois composantes : la perception, l’action et leur interaction. Un système autonome de perception doit simultanément assurer l’analyse des données acquises sur son environnement proche, établir une connaissance de cet environnement et, en fonction de cet environnement, organiser de façon autonome sa mission en termes de pilotage et de navigation. Cette problématique récente est issue du domaine de la robotique dans laquelle l’interaction robot-environnement se fait via le capteur, ce qui nécessite l’étude des mécanismes action-perception.
Deux principaux axes de recherche ont ainsi été définis, l’un centré sur la perception et l’autre sur l’action. L’interaction indispensable à l’autonomie du système autonome est répartie sur ces deux axes, baptisés respectivement :
- Axe 1 : Action Autonome
- Axe 2 : Perception Autonome
La perception (axe 2) est le processus par lequel le système essaie de comprendre ses observations et d’élaborer une représentation pertinente, non seulement de l’état actuel de l’environnement, mais aussi de son incertitude. En utilisant les résultats de la perception, le système doit alors raisonner sur les actions (axe 1) à conduire pour atteindre ses objectifs de mission selon certains critères comme l’efficacité, la sécurité, la rapidité ou encore la consommation énergétique.
APPLICATIONS
Défense et sécurité, archéologie sous-marine, intervention en environnement hostile
COMPÉTENCES
L’équipe est formée de chercheurs spécialisés d’une part dans le traitement de l’information, d’autre part dans la robotique et l’automatique. Elle propose des outils mathématiques originaux, en particulier les méthodes ensemblistes, adaptés à la gestion des incertitudes dans un environnement non structuré, comme le milieu marin.
ENSTA Bretagne contribue aux programmes de recherche suivants
Contrat de recherche SHOM
« NAVIDRO » (12 mois) pour le développement d’un simulateur de NAVIgation précise des drones sous-marins.
Projet DGA MRIS
Validation de drones et essaims de drones autonomes (36 mois) avec l’Ecole Polytechnique, ISAE, ENSTA ParisTech.
Bon de commande DGA TN
Réalisation d’une étude sur la génération d’images sonar de synthèse et sur la détection et la classification automatiques de cibles à l’aide de techniques d’apprentissage profond» (24 mois).
DGA Rapid « Chimaera »
24 mois avec OXXIUS, Thales, IMTA : lasers, Détection et évitement de filets, Communications sous-marines.
Contrat de recherche DGA TN Brest
Ident3D 36 mois : Etude de traitements de données 3D pour l’aide à l’identification de mines.
contact
Isabelle Quidu
Enseignante-chercheure
Département STIC
Laboratoire Lab-STICC / Pôle IA&Océan / Equipe M3
+33 (0)2 98 34 89 21
Equipe TOMS "Traitement, observations et méthodes statistiques"
Cette équipe du Lab-STICC contribue sur des aspects méthodologiques et pratiques au traitement statistique du signal et des images. Les applications, qui constituent un moteur essentiel de sa recherche, concernent l’étude des environnements, et plus particulièrement le traitement des données issues de systèmes d’observation marins ou aériens.
Développement de méthodes d’estimation, de détection et de représentation des signaux.
Le monitoring de l’environnement marin et sous-marin : localisation de sources acoustiques, caractérisation du milieu, de la nature et de l’évolution des fonds, détection et reconnaissances d’objets.
La télé détection spatiale et aéroportée : estimation spatio-temporelle de champs géophysiques et de dynamiques écologiques ; détection et reconnaissance d’objets (navires, avions…) surveillance de zones d’intérêt (détection, suivi...).
Compétences :
- Biologie marine.
- acoustique passive, radar à synthèse d’ouverture.
- traitement du signal/image avancé : traitement d’antenne, analyse temps-fréquence, méthodes non-linéaires, inférence bayésienne, modèles parcimonieux, acquisition compressée (compressed sensing).
- data science pour la mer & big data : apprentissage automatique (deep learning...).
Applications :
Défense (acoustique sous-marine et radar), biologie marine, observation de l’environnement.
ENSTA Bretagne contribue aux programmes de recherche suivants
DGA ASTRID «Deep Detect»
Détection et reconnaissance d’objets multiples sur fonds variables par apprentissage profond. (Partenaires : IRISA, UBO UMR AMURE, MBDA).
ANR «OrcaDepred»
Evaluation des conséquences écologiques et socio-économiques de la déprédation exercée par les cétacés sur les pêcheries à la palangre, approche technico-économique en vue de sa suppression. L’équipe utilise le suivi par acoustique passive pour évaluer le niveau d’impact du bruit des navires sur l’attirance des cétacés. (Partenaires : CEBC-CNRS, MNHN, UBO AMURE, INRA BIOSP, IRD MARBEC, IFREMER).
«OHASISBIO»
Observatoire hydroacoustique de la sismicité et de la biodiversité dans l’océan Indien (Partenaire : LGO UBO).
«GLIDER AND WHALES»
Utilisation d’un glider acoustique pour le suivi des baleines (Partenaire : Fondation Total pour la biodiversité).
«OSMOSE»
(Open Science meets Ocean Sounds Explorer) : projet collaboratif en acoustique passive sous-marine pour l’observation des océans (Partenaires : IMT Atlantique, IUEM, WHOI (Institut océanographique de Woods Hole).
Traitement de données acoustiques
En vue de la caractérisation des fluctuations de l’environnement marin » (commande DGA TN ; avec WHOI).
contact
Angélique Dremeau
Enseignante-Chercheuse
Département STIC
Laboratoire Lab-STICC / Pôle DMID / Equipe MATRIX
+33 (0)2 98 34 89 71
Laboratoire commun Gustave Zédé
Le laboratoire commun de recherche et d'innovation "Gutave Zédé" a été créé fin 2015 entre l’ENSTA Bretagne et Naval Group. Les recherches expérimentales et de modélisation portent sur des problématiques liées à la résistance, la stabilité et la durabilité des matériaux utilisés, notamment dans le naval militaire. Ce dispositif permet de développer des outils innovants d’aide au dimensionnement des structures navales mais aussi des outils numériques de prédiction de la tenue en fatigue de ces structures soumises à des sollicitations extrêmes
Au sein du « labcom » Gustave Zédé, les études s'intéressent à 3 thèmes scientifiques principaux :
- Caractérisation rapide des propriétés en fatigue des matériaux
- Caractérisation rapide des propriétés en fatigue des assemblages
- Nouveaux procédés de fabrication et tenue en fatigue
Grands projets
Projet Européen H2020 RAMSSES : pour des navires plus propres et plus performants.
37 partenaires dans 11 pays contribuent aux 13 axes d’innovation qui composent ce projet. Les différents lots se complètent pour réduire l’empreinte environnementale des navires. Comme dans l’aéronautique ou l’automobile, l’allègement est un des défis.
Sur ce thème, l’équipe ENSTA Bretagne/Naval Group est en charge des lots sur la durabilité des liaisons collées entre un module composite et une structure métallique. Cela comprend également la mise en place d’une chaîne de calcul d’aide au dimensionnement en fatigue à grand nombre de cycles de propulseurs en aciers, obtenus par fabrication additive. Ces modèles seront validés par des essais à grande échelle.
Projet EA FRAPAN (2018-2020)
Ce projet porte sur la caractérisation et la modélisation de la tenue en fatigue de pièces pour bâtiments navals, obtenues par fabrication additive, de type WAAM (Wire Arc Additive Manufacturing).
Il s’agit d’améliorer la compréhension du lien entre l’hétérogénéité de la microstructure résultant d’un tel procédé de fabrication et les propriétés en fatigue de la pièce.
Projet EA AMERICO: Amélioration des Méthodes d’Etudes pour la Réalisation et l’Industrialisation des Coques de sous-marins
Deux thématiques principales sont traitées : le formage et la tenue en fatigue.
Il s’agit de prédire la tenue en fatigue de structures et d’assemblages de structures navales (par joints soudés ou par collage) en prenant en compte les effets liés aux modes de fabrication de ces structures, ainsi que la variabilité des chargements réels. La prédiction de la tenue mécanique des structures navales s’étend à d’autres modes de ruine comme les chocs ou flambements.
Projet EA INCOLA (2020-2022).
Il porte sur la fatigue multiaxiale des arbres d’hélice.
Dans le cadre d’une thèse, les travaux visent la caractérisation rapide des propriétés en fatigue des matériaux métalliques utilisés.
contact
Cédric Doudard
Enseignant-chercheur
Equipe Comportement et durabilité des matériaux, Laboratoire IRDL (UMR CNRS 6027)
+33 (0)2 98 34 89 27