



Jeudi 13 juin à 15h à l'ENSTA Bretagne (Amphi 3), Thibaut NICO, doctorant au Lab-STICC (UMR CNRS 6285), Equipe PRASYS sous contrat CIFRE chez ECA Robotics soutiendra sa thèse.
«Stochastic differential equations for the electromagnetic field scattered by the sea surface: applications to remote sensing »
Résumé
La télédétection radar en contexte maritime est généralement perturbée par les ondes radar réfléchies par la mer, contribution qui est appelée clutter de mer (ou fouillis) en raison de son caractère complexe voire aléatoire. Une compréhension approfondie du clutter de mer est nécessaire pour la détection de cible et l'imagerie radar. Des modèles statistiques ont longtemps été utilisés (K distribution, distribution de Weibull, etc), mais ils ont l'inconvénient d'être statiques. Nous proposons d'utiliser un modèle dynamique développé par T. R. Field, au sein duquel le clutter de mer est un processus aléatoire qui résout des équations différentielles stochastiques. Nous introduisons le modèle de Field pour la surface équivalente radar (SER) et le speckle. La réflectivité complexe de la mer dépend alors de trois paramètres : A, B et α.
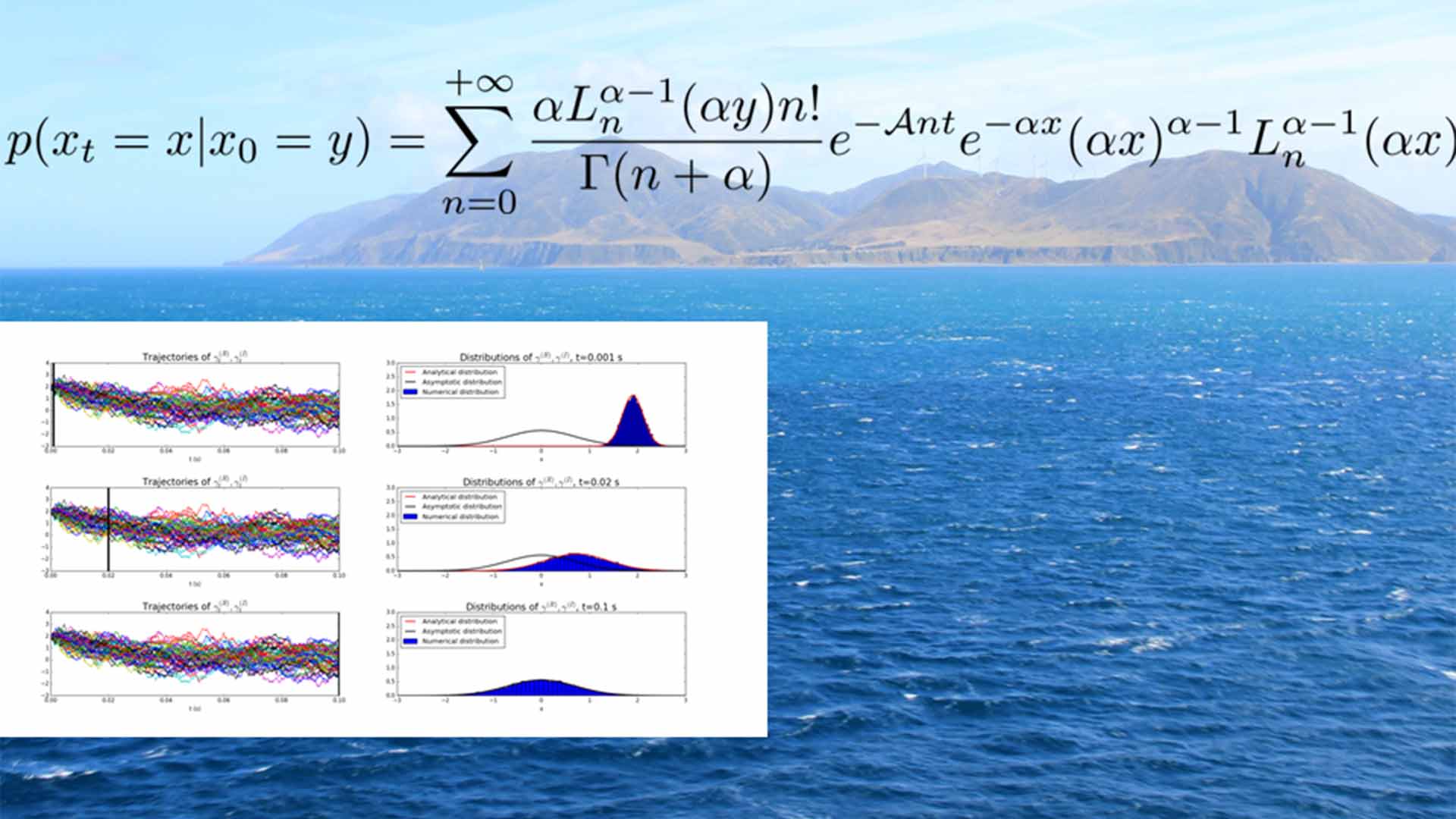
Nous calculons les probabilités de transition de la SER et du speckle par résolution analytique d'équations de Fokker-Planck. Nous proposons alors de les utiliser comme outils pour synchroniser des observations prises à des positions et temps différents, comme dans le cas des Radars à Synthèse d'Ouverture. Nous estimons les paramètres A et B par maximum de
vraisemblance (MV) et montrons numériquement qu'il est possible à moindre coût d'approximer les probabilités de transition exactes par des gaussiennes grâce au schéma d'Euler-Maruyama. α est quant à lui estimé par ergodicité (moment). Nous adaptons le modèle de Field pour prendre en compte une cible simple, et montrons qu'il est possible d'estimer les paramètres de la cible par MV en utilisant à nouveau des approximations gaussiennes pour les probabilités de transition. Dans la dernière partie, nous abordons la non-observabilité de la SER en l'estimant à partir de la réfléctivité complexe (observable). Nous proposons un schéma composé d'une suite d'estimateurs directement applicable à des données réelles.
Finalement, nous introduisons et discutons l'estimation bayésienne des paramètres du clutter, et la détection de cible, comme potentiels futurs travaux de recherche.
Mots clés
clutter de mer, radar, milieux aléatoires dynamiques, équations différentielles stochastiques,
probabilités de transition, estimation
Composition du jury
Rapporteurs :
- M. Josselin GARNIER, Professeur, Ecole Polytechnique, Centre de Mathématiques Appliquées, Palaiseau
- M. Gabriel SORIANO, Maître de Conférences, HDR, Institut Fresnel, Université d’Aix-Marseille
Examinateurs :
- M. Bertrand CHAPRON, Docteur, IFREMER, Laboratoire d’Océanographie Physique et Spatiale, Brest
- M. Thierry CHONAVEL, Professeur, IMT Atlantique, Lab-STICC, Brest
- Mme Marie DU ROY DE CHAUMARAY, Maître de Conférences, ENSAI, Bruz
- M. Charles-Antoine GUERIN, Professeur des Universités, Institut Méditerranéen d’Océanologie, Université de Toulon
- M. Alexandre BAUSSARD, Professeur des Universités, Institut Charles Delaunay, Université de Technologie de Troyes, Directeur de thèse
- M. Arnaud COATANHAY, Enseignant-Chercheur, ENSTA Bretagne, Lab-STICC, co-encadrant
Invités :
- M. Philippe POULIGUEN, Ingénieur RDS « Ondes acoustiques et radioélectriques », HDR, Agence Innovation Défense, Paris

















