



Jeudi 5 décembre 2019 à 10h00 en amphi 3 à l'ENSTA Bretagne, Thomas Le Mézo soutiendra sa thèse intitulée : Bracketing largest invariant sets of dynamical systems. An application to drifting underwater robots in ocean currents
Thomas LE MEZO est doctorant à l'ENSTA Bretagne au sein du Lab-STICC (UMR CNRS6285), Equipe PRASYS.
Résumé de la thèse :
La vérification de la sûreté de fonctionnement des systèmes robotiques est une question fondamentale pour le développement de la robotique. Elle consiste, par exemple, à vérifier qu’une loi de commande d’un robot respectera toujours un ensemble de contraintes. Plus généralement, nous nous intéresserons ici à la vérification des propriétés de systèmes dynamiques, ces derniers permettant de modéliser l’évolution d’un robot.
La contribution principale de cette thèse est d’apporter un nouveau moyen d’encadrer les ensembles invariants de systèmes dynamiques. Pour cela, un nouveau domaine abstrait, les mazes, et de nouveaux algorithmes sont présentés. Il est également montré, au travers de nombreux exemples, comment des problèmes classiques de validation peuvent être ramenés à un problème d’encadrement d’ensembles invariants. Enfin, les résultats sont étendus à l’encadrement des noyaux de viabilités.
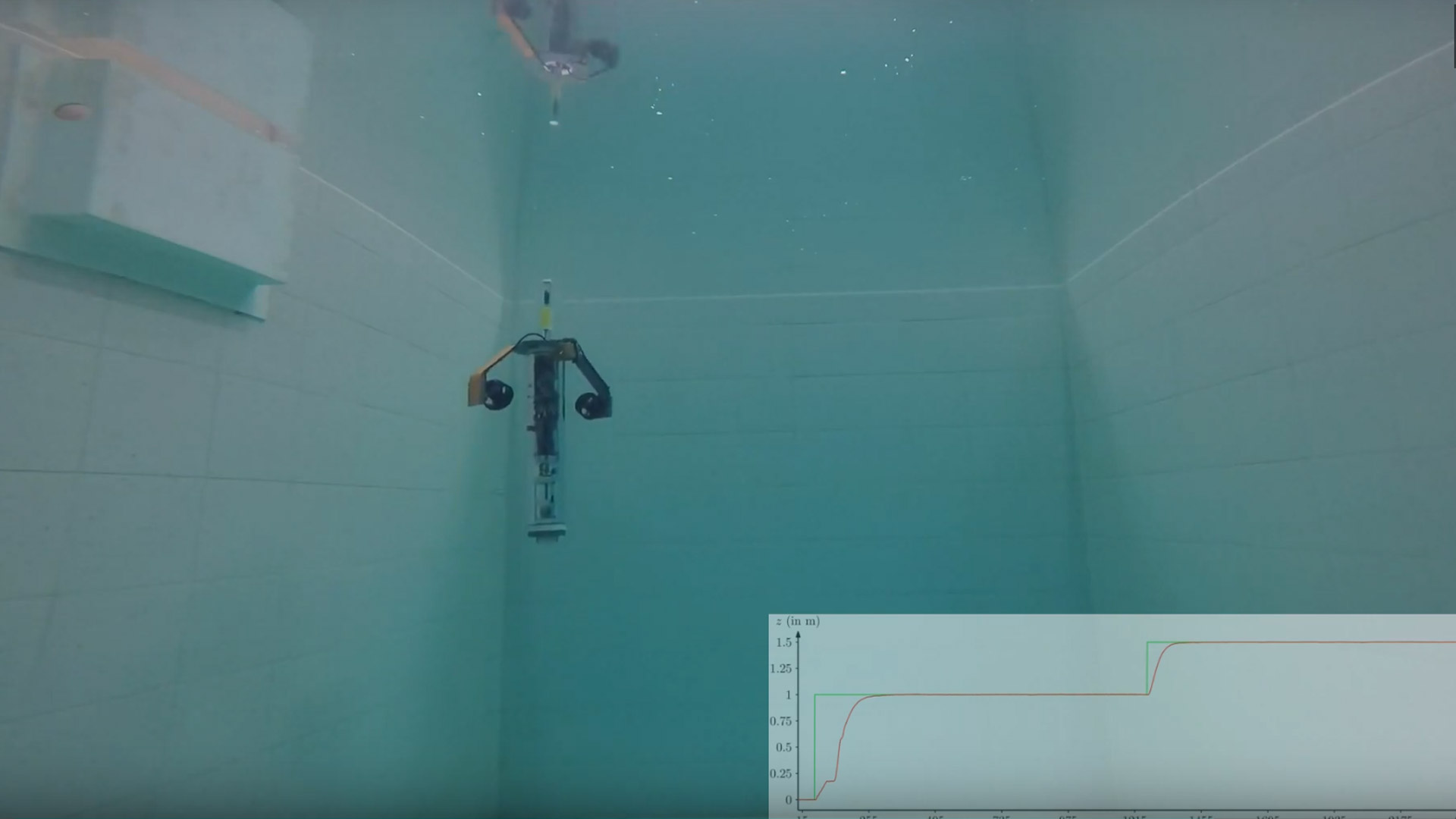
Cette thèse s’appuie également sur une application en robotique sous-marine. L’idée principale est d’utiliser les courants marins pour qu’un robot sous-marin puisse parcourir avec efficience de grandes distances. Un nouveau type de robot autonome bas coûts a été développé pour ce type de mission. Ce nouveau flotteur profileur hybride est capable de se réguler en profondeur grâce à une nouvelle loi de régulation, mais également de corriger sa trajectoire à l’aide de propulseurs auxiliaires. Ils permettent au robot de choisir la bonne veine de courant à emprunter.
Les outils de validations précédemment introduits sont utilisés pour valider la sûreté du robot et de la mission. Des expérimentations en conditions réelles ont également permis de valider le prototype.
Mots-Clés : robotique sous-marine, systèmes dynamiques, ensembles invariants, interprétation abstraite, programmation par contraintes, flotteurs profilers.
Composition du jury :
Rapporteurs :
- M. Antoine GIRARD, Directeur de Recherche CNRS, Centrale Supelec L2S Gif sur Yvette
- M. David DANEY, Chercheur, HDR, INRIA Talence
Examinateurs :
- M. Nicolas DELANOUE, Maître de confrences, HDR, Polytech’Angers, LARIS Angers
- M. Reda BOUKEZZOULA, Professeur des Universités, Université de Savoie, LISTIC Annecy Le Vieux
- Mme Thao DANG, Directrice de Recherche CNRS, Université Grenoble Alpes, Verimag St Martin d’Heres
- M. Luc JAULIN, Professeur des Universités, ENSTA Bretagne, Lab-STICC, Brest, directeur de thèse
- M. Benoît ZERR, Professeur ENSTA Bretagne, Lab-STICC, co-directeur de thèse
- M. Damien MASSE, Maître de conférences, Université de Bretagne Occidentale, Lab-STICC, Brest, co-encadrant
Invité :
- Mme Véronique SERFATY, Responsable Innovation du Pôle Numérique, Agence Innovation Défense, Paris

















