|
|
|
|
|
Financement : DGA-TN.
Début de la thèse : Octobre 2014.
Directeur de thèse : Luc Jaulin
Titre : SLAM in unstuctured environments; a set-membership approach
Soutenance : Jeudi 24 mai 2018 à 10:00, Amphi 2 à l'ENSTA-Bretagne
Lieu de soutenance : Brest, ENSTA-Bretagne
Ci dessous, vous trouverez ici la thèse : ![]()
Et la planches de la présentation : ![]()
Warwick Tucker (rapporteur), Professeur des Universités en mathématiques.
Calcul par intervalles pour les systèmes dynamiques, Intelligence artificielle.
Sylvie Galichet (rapporteur),
Professeur des Universités en informatique. Logique, inférence, intelligence artificielle.
Luc Jaulin (directeur de thèse), Professeur des Universités en robotique.
Simon Lacroix (président), Directeur de recherche CNRS,
Robotique mobile et SLAM.
Fabrice Le Bars (examinateur), Enseignant chercheur en robotique.
Localisation, robotique sous-marine.
Vincent Creuze
(examinateur). Robotique sous-marine.
Alain Bertholom (examinateur), Ingénieur DGA-TN. Robotique sous-marine.
Nicolas Drogi (examinateur), Sous-Directeur technique de DGA-Tn.
![]() L. Jaulin and B. Desrochers (2014). Introduction to the Algebra of Separators with
Application to Path Planning.
Engineering Applications of Artificial Intelligence,
volume 33, pages 141-147.
L. Jaulin and B. Desrochers (2014). Introduction to the Algebra of Separators with
Application to Path Planning.
Engineering Applications of Artificial Intelligence,
volume 33, pages 141-147.
![]() L. Jaulin, B. Desrochers and D. Massé (2016).
Bisectable Abstract Domains for the resolution of equations involving complex numbers.
Reliable Computing, a special issue in honor of Ray Moore,
Vol. 23, pages 35-46.
L. Jaulin, B. Desrochers and D. Massé (2016).
Bisectable Abstract Domains for the resolution of equations involving complex numbers.
Reliable Computing, a special issue in honor of Ray Moore,
Vol. 23, pages 35-46.
![]() B. Desrochers and L. Jaulin (2016).
A Minimal Contractor for the Polar Equation; Application to Robot Localization,
Engineering Applications of Artificial Intelligence,
Vol. 55, Pages 83–92.
B. Desrochers and L. Jaulin (2016).
A Minimal Contractor for the Polar Equation; Application to Robot Localization,
Engineering Applications of Artificial Intelligence,
Vol. 55, Pages 83–92.
![]() B. Desrochers and L. Jaulin (2017).
Computing a guaranteed approximation the zone explored by a robot.
IEEE Transaction on Automatic Control.
Volume 62, Issue 1, pages 425-430.
B. Desrochers and L. Jaulin (2017).
Computing a guaranteed approximation the zone explored by a robot.
IEEE Transaction on Automatic Control.
Volume 62, Issue 1, pages 425-430.
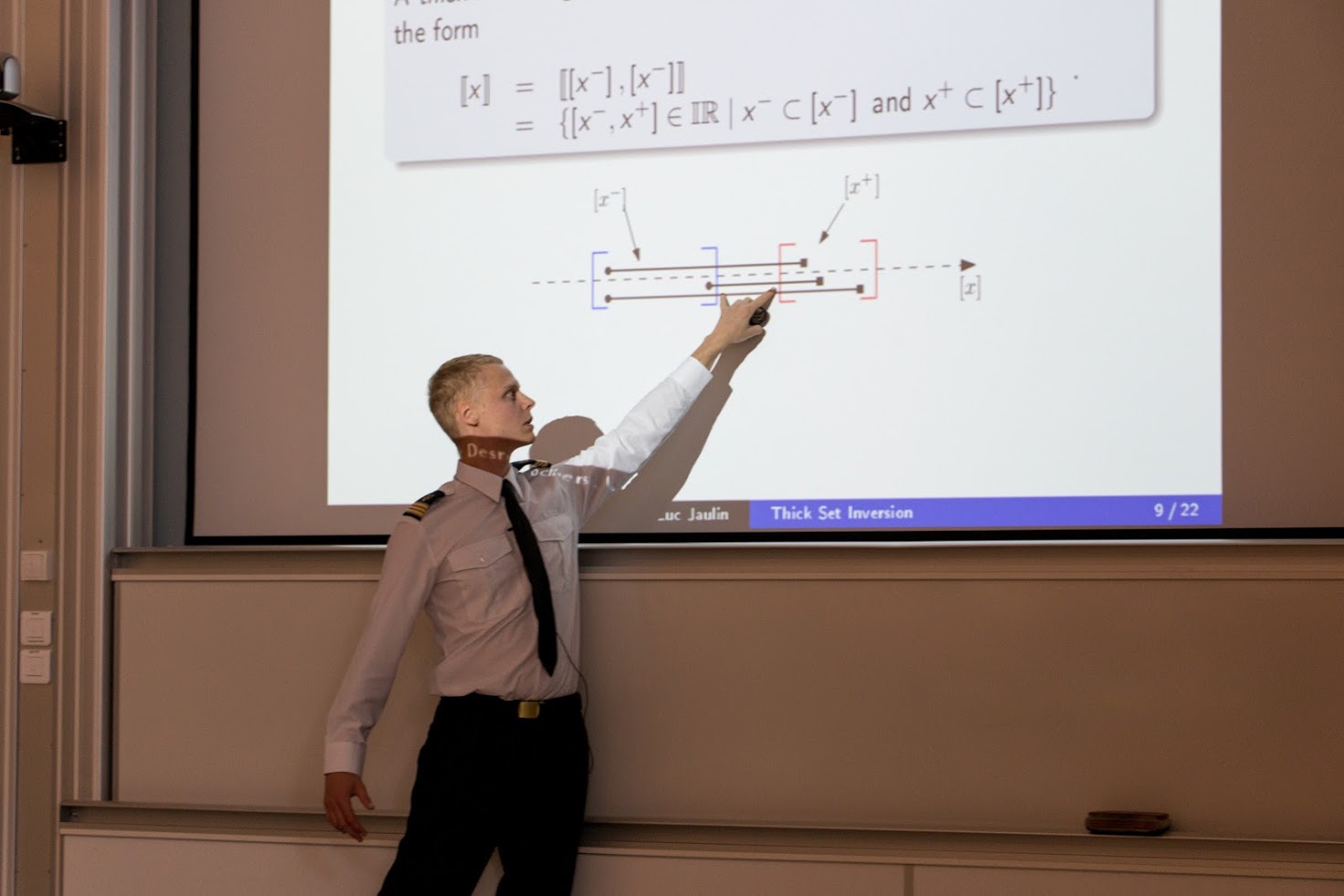
![]() B. Desrochers and L. Jaulin (2017).
Thick set inversion.
Artificial Intelligence.
Volume 249, Issue C, Pages 1-18.
B. Desrochers and L. Jaulin (2017).
Thick set inversion.
Artificial Intelligence.
Volume 249, Issue C, Pages 1-18.
![]() L. Jaulin, A. Stancu and B. Desrochers (2014).
Inner and outer approximations of probabilistic sets.
ICVRAM 2014.
L. Jaulin, A. Stancu and B. Desrochers (2014).
Inner and outer approximations of probabilistic sets.
ICVRAM 2014.
![]() L. Jaulin and B. Desrochers (2014).
Robust localisation using separators. COPROD'14.
L. Jaulin and B. Desrochers (2014).
Robust localisation using separators. COPROD'14.
![]() B. Desrochers, S. Lacroix and L. Jaulin (2015).
Set-Membership Approach to the Kidnapped Robot Problem, IROS'15. Hambourg.
B. Desrochers, S. Lacroix and L. Jaulin (2015).
Set-Membership Approach to the Kidnapped Robot Problem, IROS'15. Hambourg.
![]() B. Desrochers and L. Jaulin (2016). Relaxed intersection of thick sets. SCAN'16.
B. Desrochers and L. Jaulin (2016). Relaxed intersection of thick sets. SCAN'16.
![]() L. Jaulin and B. Desrochers (2016). Thick separators. COPROD'16.
L. Jaulin and B. Desrochers (2016). Thick separators. COPROD'16.
![]() B. Desrochers and L. Jaulin (2017). Minkowski operations of sets with application to robot localization,
SNR'2017, Uppsala.
B. Desrochers and L. Jaulin (2017). Minkowski operations of sets with application to robot localization,
SNR'2017, Uppsala.
![]() B. Desrochers and L. Jaulin (2017). Chain of set inversion problems; Application to reachability analysis,
IFAC'2017, Toulouse.
B. Desrochers and L. Jaulin (2017). Chain of set inversion problems; Application to reachability analysis,
IFAC'2017, Toulouse.
![]() B. Desrochers, L. Jaulin and S. Kumkov (2018). Localization with data association,
MSCMQ'2018, St Petersburg, Accepted.
B. Desrochers, L. Jaulin and S. Kumkov (2018). Localization with data association,
MSCMQ'2018, St Petersburg, Accepted.
![]() B. Desrochers. PyIbex, Un outil Python pour faire du 'contractor programming'.
B. Desrochers. PyIbex, Un outil Python pour faire du 'contractor programming'.

Le public attentif (photo : S. Rohou)
Réponses parfaites aux nombreuses questions du jury (photo : S. Rohou)

Warwick Tucker pose une question difficile (photo : S. Rohou)

Remise du grade de docteur de l'ENSTA Bretagne (photo : S. Rohou)

Le plus important : le pot de thèse (photo : S. Rohou)