Les objectifs de ces deux journées d'expérimentations sont les suivants :
- Tester différents types de robots, de capteurs, de régulateurs, de techniques,
et d'algorithmes (par exemple de localisation) afin de rechercher des épaves enfouies.
Il s'agit également de se préparer en vue des recherches prévues par le DRASSM en juillet 2018
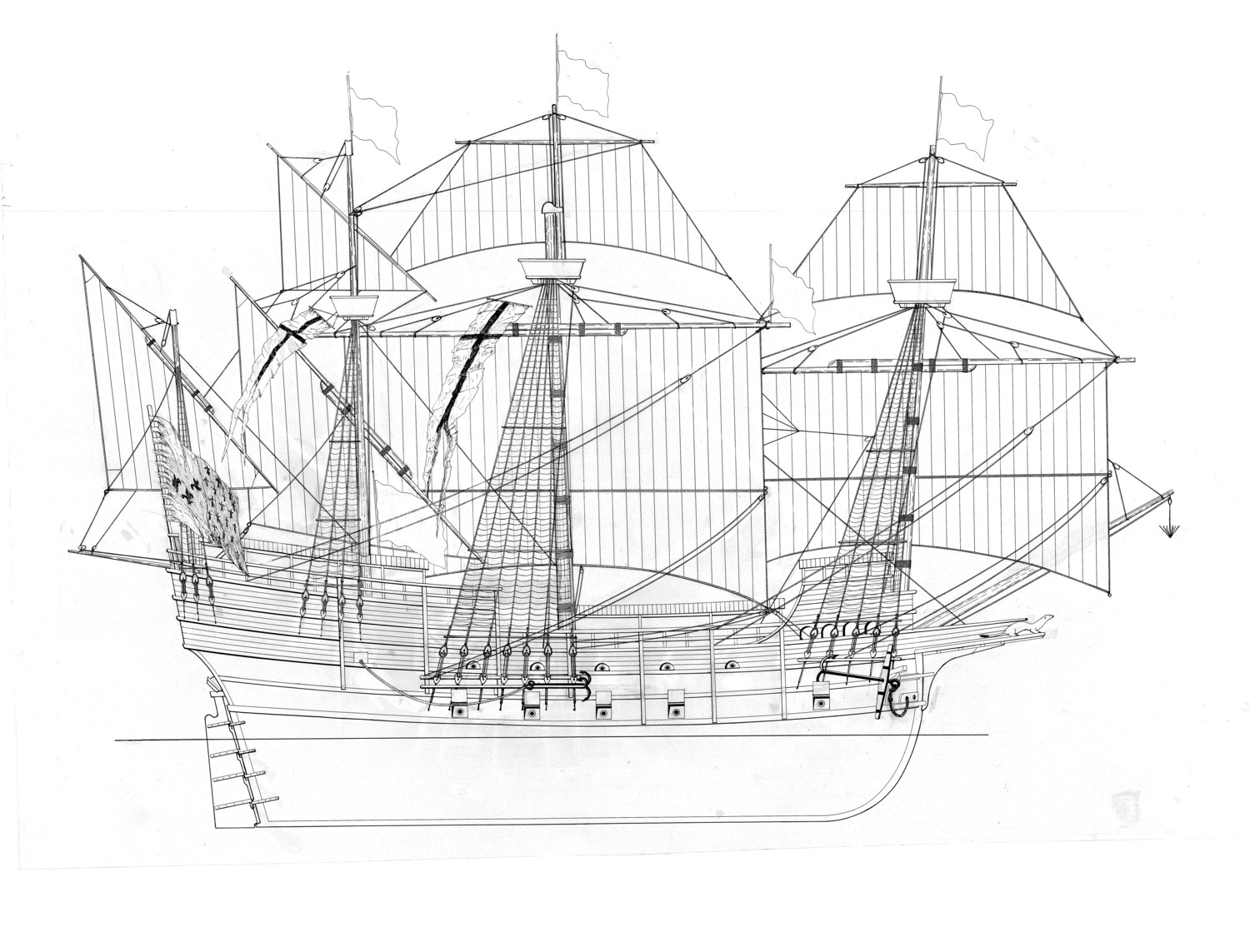
pour la recherche de la la Cordelière.
- Nous chercherons également à promouvoir le concept d'Archéo-robotique qui vise à
automatiser l'exploration de zones très vastes et peu hospitalières à l'aide de robots afin d'y trouver les
sites archéologiques.
- Enfin, nous souhaitons prépaper le workshop MOQESM'2018 qui se tiendra dans le cadre de la conférence
SeaTechWeek autour des thèmes de la robotique pour
l'archéologie sous marine.
Expérimentations prévues
Voir le document
Plus précisément, nous allons
1. Évaluer les Folaga dans ces conditions de mer avec courants.
2. Valider quelques algorithmes de navigation.
3. Tester le zodiac autonome pour tracter des AUVs ou magnétomètres.
4. Tester le robot Hélios (catamaran à moteur autonome).
5. Tester un magnétomètre marinisé.
6. Étudier différents modes opératoires pour les missions robotisés combinant différents robots.
7. Tester des algorithmes de docking.
8. Tester si des robots voiliers peuvent tracter de façon fiable des magnétomètres.
9. Tester deux voiliers de Plymouth préparés pour la WRSC.
How ?
Communication
J'essaierai de maintenir ce site à jour avec toutes les informations, changement de programme et quelques
photos.
Cependant, pour ce genre de rencontre expérimentale, la communication n'est pas facile.
En effet, les personnes sont dispersées et désynchronisées. J'ai donc créé un groupe WhatsApp.
Si vous voulez y appartenir envoyez-moi un email avec votre numéro de téléphone.
Cela peut se faire en en tant qu'extérieur, juste pour être informé, ou en tant que participant, pour poster
des informations ou des photos.
Bateaux
Nous avons eu la Panopée et le zodiac de l'ENSTA.
Nous avons également loué trois zodiacs, un voilier et deux kayaks.
Luc a apporté ses 4 kayaks.
Magnétomètre du Shom
Le Shom viendra avec un SMMII. Le prêt a été formalisé.
L'appui se fait avec une valise SIREP afin d'intégrer de façon étanche un PC durci, une bretelle série vers le SMMII et une réception GPS autonome,
le tout interfacé avec Hypack. Il restera à voir comment intégrer tout çà sur le zodiac.
Le Shom a installé à l'avance une station de référence mag au Shom pour une durée indéterminée.
Elle couvre ainsi le Submeeting 2018 et les opérations DRASSM de cet été.
Robots sous-marins
Nous avons chercher à utiliser les robots Folaga de Graal Tech: https://www.graaltech.com/.
L'entreprise Kopadia est venue avec 3 de ses robots.
Voitures
Nous avions réservé trois voitures de l'ENSTA :
- Logan Dacia Break. (resp. Maël Le Gallic)
- Kangoo. (resp. Pierre Simon)
- Peugeot 308. (resp. Luc Jaulin)
When ?
Programme
Il n'y a pas de vraiment de programme fixe pour ces deux journées.
Il s'agit en effet plus d'un lieu de rendez-vous pour effectuer des expérimentations en robotique marine.
Nous aurons une salle de séminaire et de projection.
Il y a donc des présentations dans cette salle mais aussi en mer sur le thème de la robotique marine pour l'archéologie.
Voici le programme flottant qui a évolué avec la météo, le matériel et le public.
Ce qui est écrit en vert ci-dessous concerne la logistique.
Lundi 21
11h. The Plymouth team (Christophe, Ulysse and Jian) arrive au Trez-Hir
avec deux voiliers autonomes (1.2 m et 2m). Leur ferry arrive à Roscoff à Monday 21.
Ils repartent le mercredi vers 13h. Luc arrive aussi avec 4 kayaks pour suivre robots.
11h36 : marée haute
16h. Maël et Joris partent avec la Kangoo .
Ils vont tracter le zodiac jusqu'au Trez-Hir. Dans le zodiac, ils mettront la catamaran Hélios et le bateau d'Auguste Yoda.
17h58 : marée basse
18h. Premiers tests du zodiac autonome.
19h. Pierre Simon part avec la Panopée à 19h du port de Brest.
Il amène Vincent, Laurent, Loïca qui arrivent par le train à 18h34.
20h. Arrivée de la Panopée au Trez-Hir.
22h50 : marée haute
Mardi 22
9h: Ouverture.
Café. Discours d'introduction, tour de table, rappel des consignes de sécurité.
9h30. Le centre nautique nous met à disposition trois zodiacs
(dont un pour Kopadia) un voilier et deux canoës.
11h. Test d'un magnétomètre à terre
René Ogor fera une présentation sur le fonctionnement d'un magnétomètre pour la recherche d'épave.
Il faut un endroit un peu dégagé pour pouvoir dérouler une douzaine de mètres de câble et poser le solénoïde (sur la page par exemple).
Prévoir aussi une masse métallique ferreuse (genre bouteille de plongée) à faire passer
devant le solénoïde pour faire réagir l'appareil.
11h36: 22 mai, marée haute
17h58 : 22 mai, marée basse
21h. Conférence de René Ogor, chasseur d'épave
René Ogor présente :
"Les épaves: de la recherche à la découverte et à l'identification à travers quelques exemples"
22h. Projection d'un documentaire sur l'archéologie sous-marine par des robots
Film sur la première plongée de l'humanoïde sous-marin Ocean One de l'Université Stanford.
Vincent Creuze pourra répondre ensuite aux questions techniques.
Mercredi 23
Kopadia : des robots sous marins bas-coût pour l'exploration
Hervé De Forges nous présente les robots Folaga de Kopadia, leurs performances mécaniques
et le type d'algorithmes qui sont implémentés pour la navigation et le contrôle.
12h08 : marée haute
19h14 : marée basse
Jeudi 24
Le 24 mai 10h. Soutenance de thèse Benoît Desrochers
La date de l'événement a été choisie volontairement pour précéder
la soutenance de thèse de Benoît Desrochers,
le 24 mai, qui porte sur la localisation et le SLAM de robots sous-marins.
15h. Visite des robots de DGA-TN
L'après midi du 24 mai, à 15:00, une visite de DGA-TN à Brest est proposée,
avec une présentation des robots autonomes sous-marins:
Daurade, AUV Guerre des mines, AUV Identif, AUV de neutralisation.
Un nombre maximum de 20 personnes est autorisé.
Pour les personnes intéressées, il me faut un scan de votre carte d'identité rapidement.
Tout se passera au Trez Hir au centre Igesa
Nous ne finançons pas les voyages, mais uniquement les repas et l'hébergement (pour certains extérieurs).
L'adresse du centre est la suivante :
16 Boulevard de la Mer, 29217 Plougonvelin, Phone: 02 98 48 30 43.
C'est Annick (annick.billon-coat@ensta-bretagne.fr) qui centralise les demandes de repas et d'hébergement.
Carré du Trez Hir
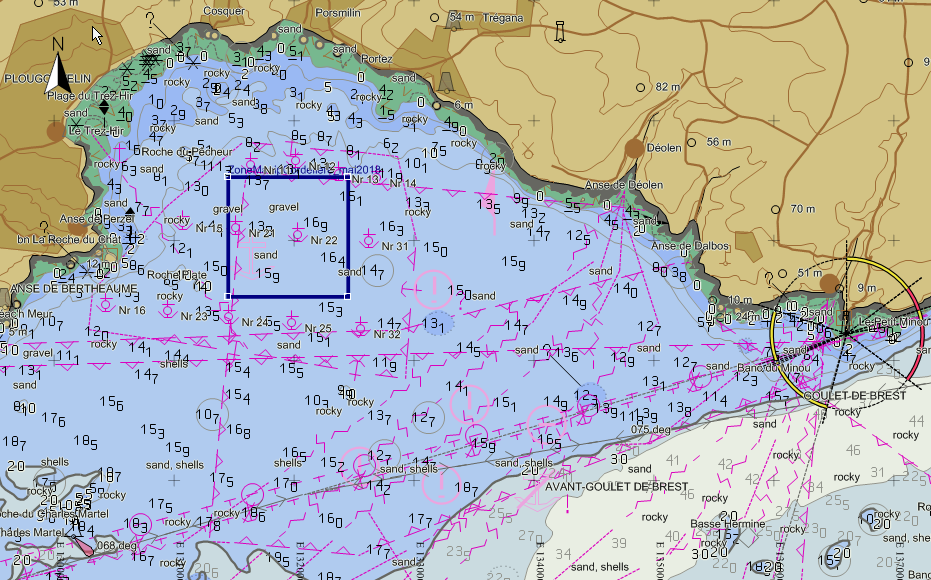
Nous avons réservé une zone en forme de carré de 1km2, nommée le carré du Trez Hir,
pour laquelle nous avons obtenu les autorisations :
Latitude
Longitude
48.343872717
-4.685302005
48.345279285
-4.664346569
48.330974036
-4.661923985
48.329088344
-4.683404221
Nous (Pierre Simon, Maël Le Gallic, Joris Tillet) avons au préalable scanné la zone au sonar multi-faisceaux avec la Panopée (bateau de l'ENSTA-Bretagne)
pour avoir une carte bathymétrique de la zone.
Romain Schwab a traité des données bathymétriques du carré du Trez Hir et les a mis sous forme d'une image et un fichier texte.
Image haute définition : submeeting_carre.tif
Sous forme d'un fichier ascii : submeeting_carre.txt
FAQ
Question. J'ai besoin d'un voilier/kayac/zodiac pour récupérer mon robot
qui vient s'accrocher sur une épave. Réponse. Demander à Annick qui vous affectera un véhicule nautique.
Pour les bateaux à moteur, il faut être autorisé (assurance ENSTA) et avoir un permis bateau.
Pour les voiliers, il faut savoir les piloter. Pour les kayaks, il faut savoir ramer.
Question. Mon train/avion part à 18:30 de la gare de Brest.
Il faut me raccompagner à l'aide d'une voiture. Réponse. Annick vous affectera une voiture et un chauffeur. Il faut la prévenir pas
trop tard.
Question. Je souhaiterais manger et je ne suis pas inscrit. Réponse. Voir avec Annick. Il est probable qu'une personne prévue se soit désistée
et donc vous pourrez prendre sa place.
Question. Je voudrais prendre des photos des robots en mer. Réponse. Voir avec Annick. Elle pourra probablement vous affecter un bateau
avec un conducteur.
Question. J'ai besoin de faire voler un drone sur la zone pour filmer. Réponse. Demander à Thomas Le Mézo.
Question. Mon robot a fait plein de mesures sonar des fonds marins. Que puis-je en faire ? Réponse. Elles vous appartiennent, mais vous devez en donner une copie au DRASSM (Olivia Hulot ou Michel L'Hour).
Bilan
Logistique
Les trois journées (lundi,mardi, mercredi) se sont très bien passées avec un temps magnifique, peu de vagues,
une bonne ambiance et une solidarité entre les différents acteurs.
Le centre Igésa (merci Annick) est adapté avec une bonne qualité des repas et la mer à 100 mètres.
Les bungalows sont spacieux et parfaits pour travailler. La salle des séminaires
nous a été très utile pour les discussions et les exposés.
En revanche, il manque un ponton pour la mise à l'eau des robots. Nous avons
pu nous en sortir grâce à tous les kayaks (6 en tout et cela n'a pas été de trop)
qui permettent d'accéder aux bateaux et de contribuer aux expérimentations.
Une suggestion serait de prendre un deuxième bateau pour stocker le matériel. La Marlou
du port de Brest pourrait convenir car elle est pas chère, et elle comporte
un couchage ce qui permet de surveiller le matériel.
Le centre nautique qui nous a loué 3 zodiacs, 1 catamaran, 2 kayaks a été très arrangeant.
Nous avons pu utiliser la matériel jusqu'à 22h sans difficulté. Grâce à l'élu Jean-Noel Briant,
au responsable du centre nautique Matthieu Lemoual et à leurs agents nous avons pu avoir des prix
tout à fait raisonnables et une aide précieuse.
Le groupe WhatsApp créé pour la communication entre les différents partenaires a été indispensable, surtout
pour la logistique.
Réfectoire le premier midi
Salle des séminaires, Kopadia présente
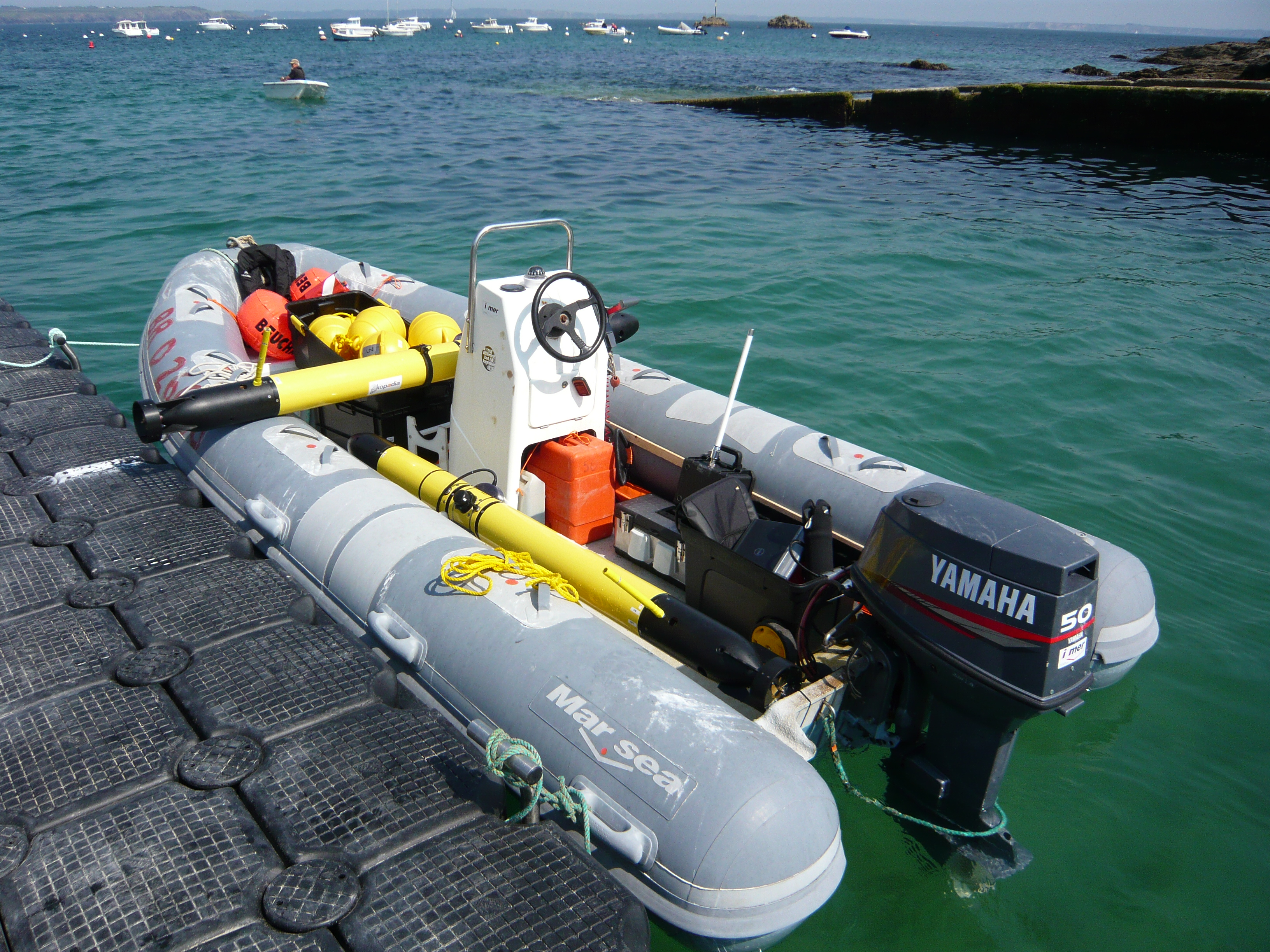
Le zodiac autonome et magnétomètre
Le zodiac autonome a fait ses premières sorties
et a été capable de faire quelques lignes propres à la fin des trois jours. Le magnétomètre du
Shom est lui aussi opérationnel et a pu être testé. En revanche, les mesures magnétiques n'ont pas pu être faites.
La semaine prochaine, le zodiac va tenter de faire un scan d'une zone et s'il y parvient de façon convaincante
nous tenterons une expérimentation avec le magnétomètre à l'aide du Shom.
Panopée et magnétomètre
René Ogor et l'équipe de l'ENSTA ont fait quelques mesures magnétiques à partir de la Panopée.
Le magnétomètre (Aquascan MC5) était tracté 20m derrière la Panopée et immergé proche du fond.
Plusieurs détections ont été faites et la position correspondante a été notée.
Le mode opérationnel a été bien compris et les explications de René nous serviront pour affiner
la robotisation de son savoir faire. La méthode est longue et laborieuse, ce qui peut engendrer
un lassitude chez l'opérateur et des erreurs. Cela rend encore plus convaincant, le développement de méthodes entièrement
automatique.
AUV de Kopadia
Les sous-marins de Kopadia ont pu évoluer dans le carré et recueillir des mesures bathymétriques qu'il reste
à analyser et à comprendre si elles pourraient suffire à une localisation précise et fiable.
Le système localisation par les balises d'Arkocéan a été testé et devrait également permettre une navigation online,
mais cela reste à faire. Nous sommes convaincus que la technologie Kopadia est à retenir dans la recherche
d'épaves, bien qu'il reste à implémenter quelques algorithmes. L'ENSTA serait ravie d'aider dans ce sens.
Localisation bathymétrique
Ce type de localisation sans balise est prometteuse comme le montrent les thèses de Jérémy Nicola, Simon Rohou
et Benoît Desrochers. Ce type de localisation pourra se faire par des méthodes par intervalles et rentre dans le cadre de
l'ANR Contredo et qui finance une partie de Submeeting.
Nous avons pris un ensemble de mesures sur différentes plateformes (zodiac autonome et sous marins)
pour valider la localisation. Nous voulons également montrer que ce type de localisation peut aboutir sur
une commande online afin de scanner une zone très large proche du fond. Pour cela, on se base sur une bathymétrie
préalablement faite par un bateau muni d'un sonar multi-faisceaux.
Concernant les expériences faites avec la Panopée, le mercredi après-midi, Simon, Romain, Irène, René
on fait un pattern avec un mono-faisceau et DVL. La Panopée était parfaitement positionnée (RTK).
Simon pourra tester ses méthodes a posteriori et pourra comparer à une vérité terrain à chaque instant.
Docking
Le docking en surface de robots sur une plateforme mobile (un autre bateau par exemple)
peut s'avérer indispensable pour le rechargement des batteries des robots scanners. Auguste (de
l'entreprise FORSSEA) a tenter de valider cette étape délicate. Ces premières expérimentations
sont très encourageantes mais montrent le chemin qu'il reste à faire.
Voiliers
Les véhicules sur batteries ont une autonomie très faible, d'autant plus s'ils sont petits.
Or, pour des raisons de sécurité, la mise en place d'engins autonomes de gros volumes peut
s'avérer impossible. Tracter un magnétomètre à partir d'un voilier est une solution
que l'Université de Plymouth cherche à valider. Les premiers tests de navigation de leurs
deux robots voiliers se sont montrés convaincants.
A améliorer
Deux jours d'expérimentation, c'est clairement pas suffisant.
Il faudrait renouveler l'opération assez rapidement (juin ?).
Il nous a manqué un plongeur. Il est important de filmer sous l'eau pour
comprendre, et fiabiliser les systèmes.
Galerie
Premières recherches faites par le GRAN (Max Guérout, Hérvé Blanchet, etc).
Cette vidéo nous servira de référence pour tracter le magnétomètre à partir du zodiac autonome. Il faut retenir que la dépresseur (aile jaune))
doit se trouver en dessous du magnétomètre afin de s'assurer que ce dernier ne touchera pas le fond.
Voir le site associé au travail des 3A de l'ENSTA Bretagne pour l'UV 5.7. Ces derniers ont travaillé pendant un an pour
préparer nos premières expérimentations.
Vidéo de promotion de la recherche de la Cordelière par des robots faite par les étudiants 3A de l'ENSTA Bretagne
Vidéo illustrant les travaux les étudiants 3A de l'ENSTA Bretagne en architecture robotique
Joris Tillet sur la Panopée
Maël Le Gallic sur la Panopée
La Panopée en train de construire une carte multi-faisceaux en vue de l'expérimentation du 22-23 mai
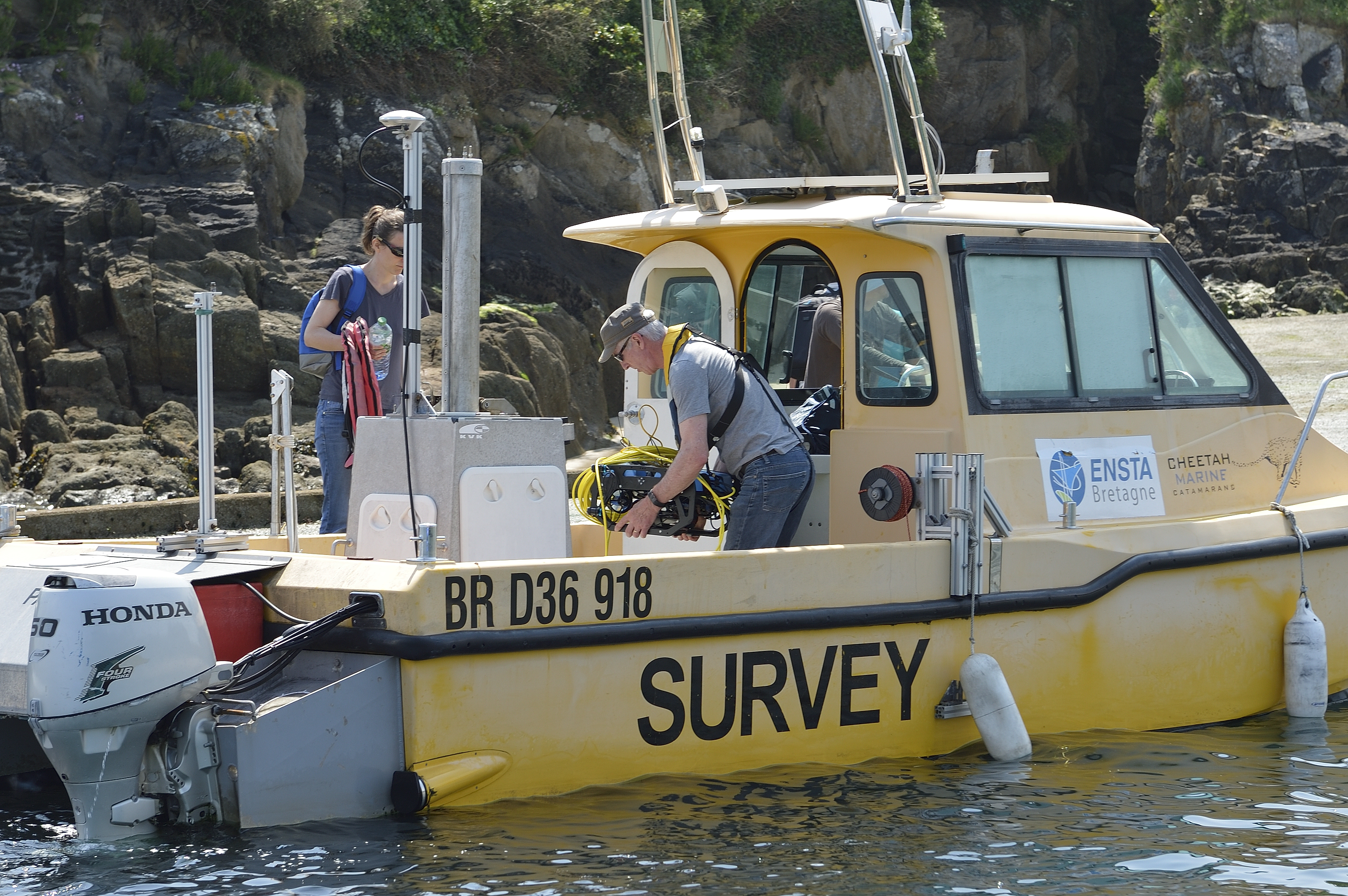
Pierre Simon et Irène Mopin (hydrographes) équipe la Panopée avant de partir pour les expérimentations du ROV
La Panopée en train de faire un relevé multi-faisceaux (photo : S. Rohou)
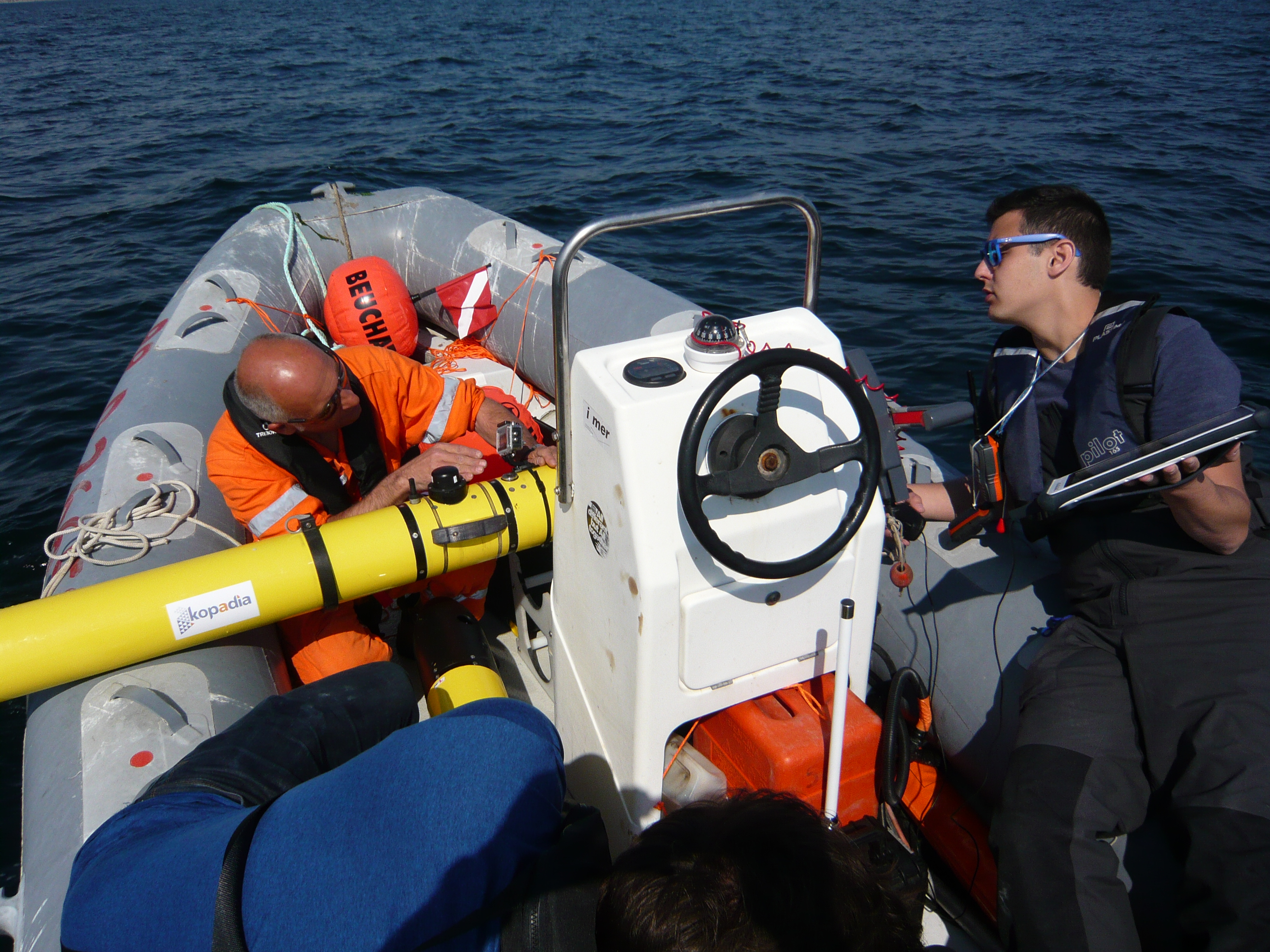
Mael, Joris et l'équipe du Shom pour mettre en place un zodiac autonome qui tracte un magnétomètre (photo : J. Ogor)
René Ogor qui recherche un épave avec une équipe de l'ENSTA (photo : J. Ogor)
L'équipe Kopadia et ses robots sous-marins (photo : J. Ogor)
Auguste Bougois et son robot YODA capable d'accoster de façon autonome le long d'un bateau en mouvement (photo : J. Ogor)
Essai de tractage autonome par YODA (photo : S. Rohou)
(photo : S. Rohou)
Toujours besoin d'un petit coup de main de nos amis de l'ISEN, ici Clément Aubry (photo : S. Rohou)
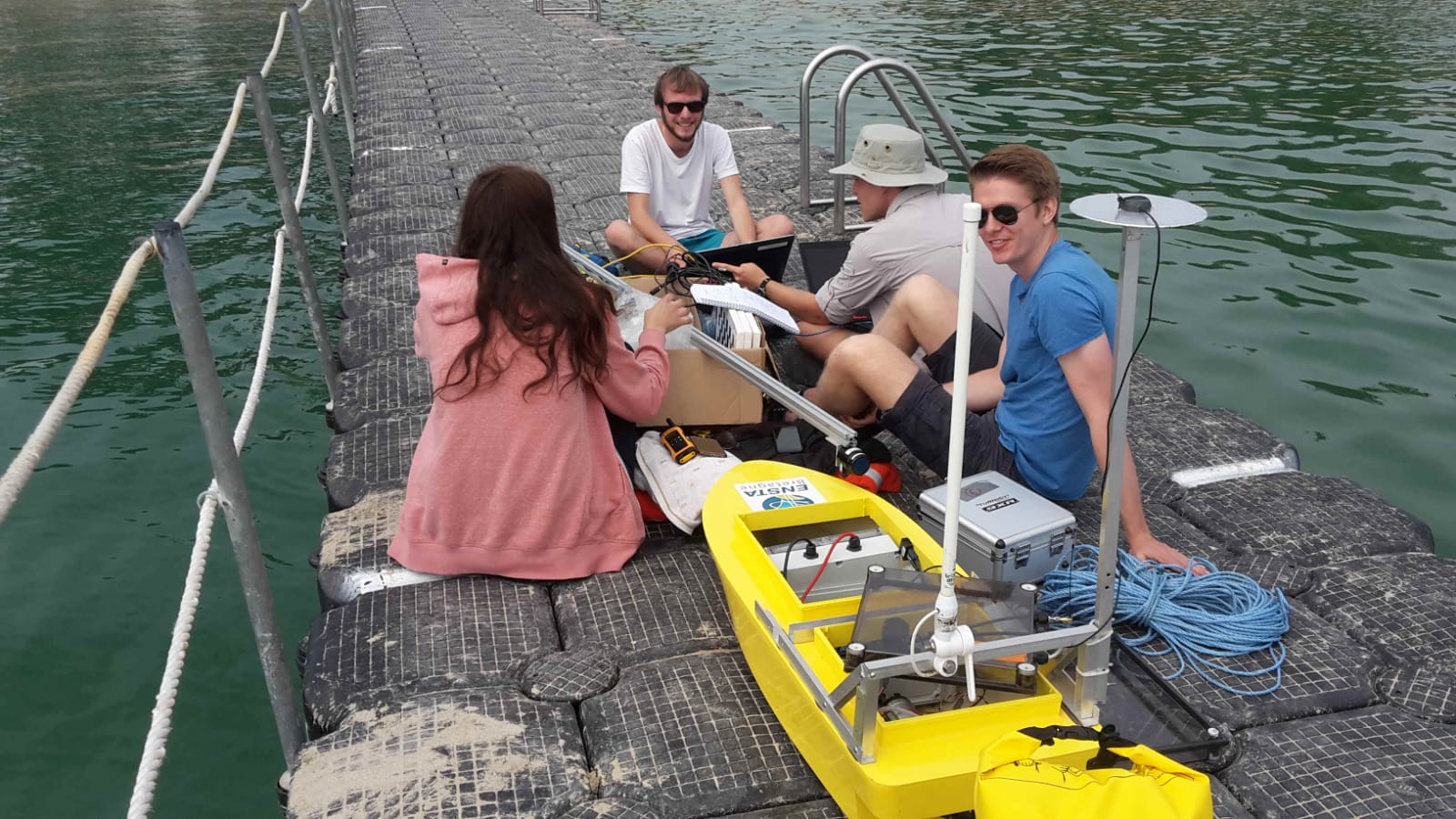
Les étudiants (Auguste, Fatma, Raphaël, Joris) en phase de débogage
Vincent Creuze (archéoroboticien officiel du DRASSM) accompagne Sylvie Galichet
pour la expliquer les expérimentations conduites.
René Ogor explique le fonctionnement d'un magnétomètre et son utilisation
Les trois embarcations louées au centre nautique.
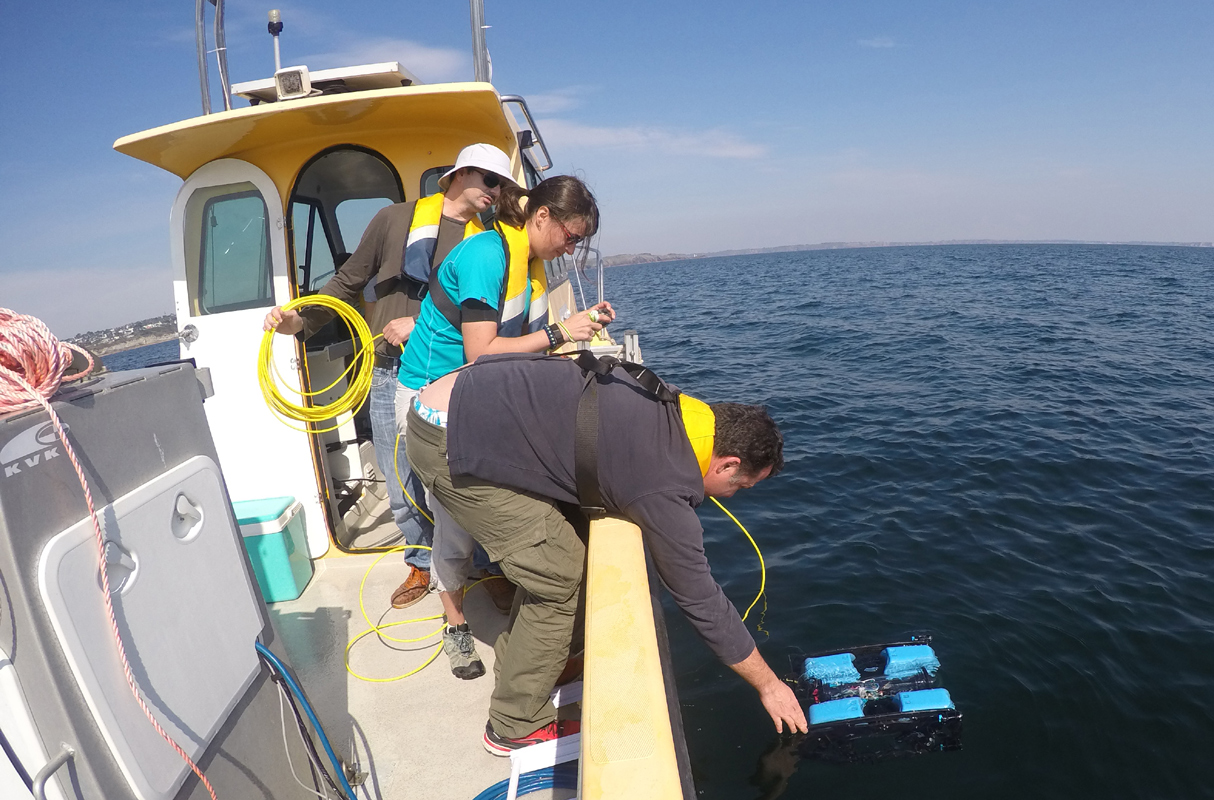
Premiers tests de fonctionnement du ROV de l'ENSTA-Bretagne
Configuration de trois Folagas
Discussion devant les bungalows du centre Igésa, autour de l'utilisation du dépresseur pour tracter le magnétomètre proche du fond
Romain dans la Panopée, configure l'enregistrement des données de position pour le scan magnétométrique
Mise à l'eau du ROV suite à la découverte d'un objet magnétique. Peut-être une des ancres de la Cordelière ?
Jian Wan (Plymouth) par vérifier le bon comportement de ses deux voiliers autonomes (photo : S. Rohou)
Les robots de Kopadia sur le départ
Mise à l'eau des robots de Kopadia
Encore d'autres photos de Simon Rohou sur Submeeting :