Control of the heading of an underwater float using an inertial disk
Gabriel Betton made the system and has shown that the heading of an underwater float can be controlled using an internal inertial disk only
Navigation using stable cycless
Quentin Brateau performs stable cycles with a blue boat
BEST 2024 à Guerlédan
En septembre 2024, nous participons à Best 2024, organisé par les étudiants de l'ENSTA Bretagne
Plus d'informations sur :
Les nouveaux bateaux autonomes
En septembre 2024, avec les nouveaux 2A de l'ENSTA Bretagne, nous expérimentons avec les nouveaux bateaux autonomes
Submeeting 2024
Morgan Louédec (en thèse à Robex) présente une mise en formation triangulaire de robots sous-marins lors du workshop 'Submeeting 2024'
Site de la conférence :
Réalisation d'un consensus entre différents bateaux autonomes communicants
En février 2024, avec les 2A de l'ENSTA Bretagne, nous expérimentons un consensus entre différents robots
Year 2023
Coordination de robots sous-marins lors Drone and cap 2023
Morgan Louédec (en thèse à Robex) expérimente une coordination entre deux robots sous-marins lors du workshop 'Drone and Cap'
Voir aussi la vidéo faite par l'organisation :
La torpille à Guerlédan
Quentin Brateau teste sa torpille autonome
Guerlédan 2A Rob
The second year students from ENSTA Bretagne are experimenting at the lake of Guerlédan in September.
Helios Challenge 2023
A Moulin mer s'est tenu l'Hélios Challenge
Plus d'informations sur :
Submeeting 2023
Sur le lac de Guerlédan, des expérimentions en robotique marine
Plus d'informations sur :
Guerlédan 2A Rob
The second year students from ENSTA Bretagne are experimenting at the lake of Guerlédan in February 2023.
Guerlédan vu des étudiants
Year 2022
Guerlédan 2A Rob
The second year students from ENSTA Bretagne are experimenting at the lake of Guerlédan in September.
Journées des démonstrateurs en Automatique, Angers 2022
Ces journées se sont déroulées à Angers et nous sommes restés sur le lac de Maine
Nous avions amené Hélios, Mobesense, Yuco (une torpille autonome), les DD-boats et Spéboat.
Plus d'informations sur https://demonstrateur22.sciencesconf.org/.
Submeeeting 2022
Submeeting s'est tenu à Saint Raphaël. Nous avions amené Hélios pour la prise de mesure sonar et vidéo des fonds marins, une torpille autonome (le Riptide)
et des ROVs. Plus d'informations sur https://submeeting2022.univ-tln.fr/.
Voir aussi la vidéo faite par l'équipe com de Toulon : https://youtu.be/LIZkX93zLjs.
60 ans DGA, 50 ans ENSTA Bretagne
Exposition 60 ans DGA, 50 ans ENSTA Bretagne les 2 et 3 mars 2022 aux capucins
La robotique est à l'honneur.
La vidéo a été faite par Morgan Louédec. Elle montre les robots SpéBot, Robtide et Saturne en démo sur le site d'Oléron lors des journées Drones&Cap
Guerledus Challenge : les préparations, vu du ciel
Les étudiants 2A Rob se préparent pour le Guerledus Challenge. Ils doivent affronter les Erasmus Mundus.
Régulation en orientation d'un ROV
Guillaume Samain présente son travail de stage où il cherche à réguler un robot sous marin dans toutes les directions, et sans singularités.
Les résultats sont assez impressionnants.
Riptide
Développements et premiers tests en mer du robot sous-marin de type torpille : le Riptide
Futurobot (Intervention grand public à Rennes).
Luc Jaulin intervient sur l'exploration sous marine par des robots.
Les autres intervenants étaient Sophie Sakka et Jean-Pierre Gazeau.
Magmap (fait par les 3A roboticiens).
Magmap est un projet fait dans le cadre de l'architecture robotique.
Dans ce projet, un robot terrestre et un robot sous-marin doivent faire une carte magnétique d'une zone à explorer.
Guerledan with snow : DDboats and Riptide
With the second year-students in robotics at ENSTA-Bretagne, we had one week experiment at Guerledan lake.
This year, we had snow and it was very cold. The Riptide made some autonomous missions.
Year 2020
Stable cycles for the DDboats
For the second year-students in robotics at ENSTA-Bretagne, the Guerledan project was to make a stable cycle for an
autonomous boat: the DDboat. The only sensors available are the compass and the accelerometer.
The boat has to rebound on the border to have an idea of its position with respect to the cycle.
Autonomous parachute
For more, see the document written by Kevin Bedin:
We realized of a small autonomous parachute.
The project has been initiated by the AID for the benefit of the RPIMa.
Starting from scratch, such a system had to be modeled and simulated, different navigation
algorithms were developed, as well as an estimator allowing the analysis of the wind to which the system is
subjected in flight. The integration of these elements resulted in the realization of a first prototype for which it
was necessary to choose the appropriate sensors, the actuators, the micro-controller as well as the mechanical
design.
Matrice 600 we used for drop the parachute
Learn CNC building a micro autonomous car
Engineering students in Robotics at ENSTA Bretagne learn to design and build parts using various CNC machines
(milling, turning, 3D printer, etc.). The example of an autonomous car has been used for this purpose.
Voir aussi d'autres vidéos de ce type sur https://www.youtube.com/user/ensietarobotics/videos
Visite de la ministre Florence Parly
Fabrication d'un respirateur artificiel avec le CHU de Brest, dans le cadre de la lutte contre le COVID 19
Challenge Essaim de drones
Une équipe de l'ENSTA-Bretagne :
Bertrand Turck (2A), Jordan Yves Njamen (1A),
Vincent Charon (1A), Nicolas Odorico (1A),
ont participé au challenge.
Site du challenge :
Gozone (fait par les 3A roboticiens).
Gozone est un projet fait dans le cadre de l'architecture robotique.
Dans ce projet, un robot sous-marin doit se déplacer sans se perdre, sans GPS, en aveugle, juste avec un écho-sondeur.
Pour cela, le robot se déplace entre différents cycles stables.
Année 2019
Seabot
Le flotteur Seabot pseudo-Lagrangien, fait par Thomas, pendant sa thèse.
En se régulant uniquement en profondeur, le flotteur a pour objectif de faire une carte des courants marins existants dans la piscine.
Simon Rohou (Technique d'exploration sous-marine : histoire et innovations - Festival Baie des Sciences, Saint Brieuc).
Comment les chercheurs explorent-ils les fonds marins ?
Quelles épaves ont été découvertes dans la baie ?
Découvrez l’histoire des technologies d’exploration sous-marine,
les épaves de la baie et observez un drone de recherche sous-marine à l’oeuvre.
Prix de de la meilleure thèse de Simon Rohou (Siège du CNRS, Paris).
Guerledan Octobre 2019 (Lac de Guerlédan, Bretagne).
Expotem
Musée du Ponant à Saint Renan. Exposition sur la Cordelière
L'exposition a été faite par l'association Expotem.
Boatbot le jeudi 18 juillet
Le contrôleur développé par Calvin estime les courants avec un filtre de Kalman.
Boatbot est à un mètre de sa ligne.
Guerledan février 2018 (Lac de Guerlédan, Bretagne).
Year 2017
Eurathlon 2017 (in Piombino, Italy). Nous avons participé avec des étudiants mexicains.
Mais aussi, nous avons fait équipe commune avec l'ENSTA Paris-Tech.
www.eurathlon.eu/
Guerledan octobre 2017 (Lac de Guerlédan, Bretagne).
Guerledan mars 2017 (Lac de Guerlédan, Bretagne).
Le ministre Le Drian visite le club-robotique
Jeudi après-midi 2 février, nous avons eu droit à la visite du ministre Jean-Yves Le Drian.
L'objectif de sa venue est, sur un second plan, d'officialiser le rapprochement de l'ENSTA-Bretagne et Télécom Bretagne
(devenue l’Institut Mines Atlantique depuis sa fusion avec Mines Nantes).
Year 2016
Guerledan octobre 2016 (Lac de Guerlédan, Bretagne).
Voir le blog, pour voir de belles photos
Voir aussi le site.
Hydrographes et Roboticiens explorent le lac de Guerlédan. Il s'agit d'un projet de formation d'ingénieurs
porté par l'ENSTA Bretagne et ses partenaires qui vise à réunir les communautés de la robotique et de
l'hydrographie au sein d'un stage pédagogiques ur le terrain.
Un programme R&D innovant de plus de six mois dont deux semaines d'expérimentations intensives au Lac de Guerlédan
a été inclus dans la formation.
Sauce 2016 (La Spézia, Italie). http://sauc-europe.org/.
L'ENSTA est arrivée première.
SAUC-E (Student Autonomous Underwater Challenge - Europe) est un concours de robots impliquant des sous-marins autonomes.
Une dizaine de concurrents sont présents chaque année pour effectuer de façon autonome des missions de détection,
localisation et cartographie. Les robots doivent collaborer entre eux. Cette année, nous avons réussi à
faire collaborer notre robot sous-marin et un autre de nos robots ici un catamaran naviguant en surface.
Les figures ci-dessous illustrent le contexte de la compétition.
Les algorithmes collaboratifs élaborés dans notre laboratoire ont été testés lors de la compétition,
comme illustré par les photos ci-dessus où le robot sous marin SARDINE collabore avec le robot de surface.
Nous utilisons les algorithmes ensemblistes pour la localisation. Ces algorithmes permettent une localisation fiable
dans un environnement pourtant très incertain. La reconnaissance d'objets se fait à l'aide la la vision.
Concours HYDROcontest 2016 (Suisse).
Nous avons participé au concours de bateaux à moteurs HYDROcontest. Il s'agit d'un
concours étudiant international dédié à l'efficience énergétique nautique et maritime. L'auto-
matisation devient indispensable à la fois pour la sécurité, mais aussi pour l'économie d'énergie.
L'HYDROcontest rassemble les futurs ingénieurs et architectes du monde entier autour d'une
problématique commune : Transportez plus, plus vite, en consommant moins d'énergie. Les
étudiants sont invités à concevoir, fabriquer et piloter le bateau le plus efficient en termes
d'énergie. Nos étudiants (à la fois les roboticiens et les mécaniciens) ont conçu des robots fiables.
L'école a obtenu la première place en catégorie lourde et 2ème en léger lors de cette année 2016.
Concours WRSC 2016 (Portugal).
Nous avons participé au concours de robots voiliers autonomes : la WRSC qui s'est tenue au Portugal.
Nous avons obtenus la deuxième place sur le podium.
Les épreuves qui étaient proposées cette année était : la Fleet Race (course), Station Keeping,
Area Scanning et l'évitement d'obstacles.
Une douzaine de concurrents répartis en 2 catégories : Microsailboat (<1.5 m) et Sailboat (1.5 à 4 m).
Sur les figures ci-dessous, on peut voir notre robot rapide en rose (Merci Patrick Rousseau)
Tout à droite, se trouve notre robot d'étude spécialisé sur l'évitement d'obstacle.
Sur ce concours, nous avons collaborer avec l'Université d'Aland (Finlande).
Démonstration fête nautique de Brest 2016 (Brest).
Lors des fêtes nautiques à Brest, nous avons lancé notre robot bateau à moteur Patrouille autonome Yoda.
La transmission de la vidéo était faite en direct vers le Quai des Sciences.
Nous avons illustré l'évitement d'obstacle et le station keeping.
Nous avons eu plusieurs dixaines de milliers de visiteurs.
Une vidéo de Yoda aux fêtes nautiques de Brest est donnée ci-dessous.
Year 2015
Ci dessous, une vidéo qui présente les performances en robotique de l'année 2015.
Puis, une vidéo faite par les étudiants qui présente le club robotique cette même année.
Forum DGA. Une démonstration du principe de la viabilité avec du calcul par intervalles au forum DGA sur le lac de polytechnique est donnée ci-dessous.
Projet SCOUT. Collaboration avec RT-Sys pour la conception d'une loi de commande pour qu'un groupe de robot puisse rester en formation sous l'eau
par mesures de distance uniquement. Cette année, pour la partie intervalle, nous avons utilisé Easibex.
L'expérience finale est illustrée par la vidéo suivante.
Match de foot des NAOs. Les premières années, avec Benoît Zerr, Irvin Probst, Fabrice Le Bars
organisent des matchs de foots avec les robots humanoïdes NAO.
Eurathlon, SAUC-E, WRSC. Nous avons participé au concours de robotique Eurathlon. L'objectif est de faire collaborer
des drones volants, sous marins et terrestres. Nous obtenons les 1ères, 2èmes et 3èmes places à plusieurs épreuves d'euRathlon.
Nous sommes 2ème au classement général équipes étudiantes SAUC-E. A la WRSC, nous sommes 2ème au classement général.
Year 2014
Concours SAUC-E. Nous arrivons 1er (ex aequo).
WRSC. Nous arrivons 2ième.
Spicerack. Participation au projet Spicerack (avec Saad Ibn Seddik en thèse CIFRE) qui concerne une une mission multi-AUV (with CGG veritas).
Mine hunting. Elaboration d'algorithmes de contrôle pour des groupes de robots. Participation avec Thales au scénario
illustré par la la vidéo ci-dessous de chasse aux mines.
Avion autonome
Avec Arnaud Labadie, nous avons entrepris la construction d'un drone volant autonome.
pdf. Construit entièrement au club robotique, le robot est capable de faire seul du suivi de ligne
par une méthode par champs de potentiel.
Pom-poms NAOs.
Happening du 26 Septembre 2014, sur la Place de la Liberté à Brest.
Les pom-poms de l'ENSTA Bretagne assurent le spectacle avec les robots NAO
pour promouvoir la 31ème nuit des chercheurs !
Year 2013
Avion au dessus de l'ENSTA
Nous avons enfin réussi à faire notre avion qui vole grâce à l'aide de Rogélio Lozano.
Nous l'avons ensuite rendu autonome.
Vaimos à Angers
Nous avons aussi continué avec le voilier Vaimos
Les 12-13 juin 2013, nous l'avons fait tourner pendant deux jours à Angers
In september. We organized the WRSC for the first time in Brest
WRSC 2013.
Vaimos obtient la place de 1er sur 9 à l'épreuve d'endurance de la WRSC 2013.
Tour de l'île des morts
For more, see the slides of Vincent Drevelle:
En juillet 2013, avec V. Drevelle, S. Rohou, F. Le Bars, etc, nous avons fait réaliser le tour de l'île des morts (près de Brest)
avec un robot sous-marin autonome. L'objectif était de faire une étude bathymétrique des fonds marins autour de cette île
avec un sonar bas coût.
Comète
Dans le cadre du contrat 'Comète', nous avons travaillé sur l'exploration sous-marine par groupe de robots.
V. Drevelle, L. Jaulin and B. Zerr (2013). Guaranteed Characterization of the Explored Space of
a Mobile Robot by using Subpavings, NOLCOS'13.
Le concept est illustré par la vidéo suivante faite par Vincent Drevelle.
Concours Sauce. Participation au concours de robotique sous-marine SAUCE (Student Autonomous Underwater
Competition European), La Spezia, Italie. Nous obtenons la 3ème place sur 14.
Participation à la campagne STRASSE avec IFREMER. Lors de ses missions, VAIMOS a battu le record de distance
parcourue par un voilier autonome en faisant 480 km.
Second (and last) attempt for Breizh Spirit
During the second attempt, the performances are similar compared to the
first attempt. The only information we got is at the following link
http://www.microtransat.org/tracking.php.
Several scenarios could be imagined. An optimistic scenario could be that the three first
waypoints have been validated and the start line has been crossed. The robot
has been found two weeks later on the Irish coast. Maybe some
convincing tests would probably have been needed before throwing the robot.
Optimousse
Des étudiants
électroniciens (Rémi, François et Jérémy) encadrés par (Benoit Clément et
moi-même) ont donc conçu et fabriqué un nouveau robot voilier Optimousse, avec une
nouvelle architecture électronique utilisant une carte Arduino.
Cette nouvelle architecture est plus facile à dupliquer et
à modifier que l'ancienne. Notons que cette architecture est aussi utilisée
pour les robots planeurs aériens, robots buggys et foilers que nous développons
aussi à l'école. L'originalité de l'Optimousse
est que la voile n'est pas réglable et qu'il ne dispose pas de capteur de vent
(ses seuls capteurs sont le GPS et la boussole). Ces handicaps sont compensés
par plus d'intelligence (ou des algos de commande plus élaborés), plus de
robustesse (les capteurs de vent sur étagère ne peuvent pas être considérés
comme fiables dans un tel contexte) et un faible coût de la plateforme d'Optimousse
peut être entièrement reproduit à l'ENSTA-Bretagne en moins d'une semaine et pour un coût de moins de
1000 euros. Lire le rapport de Rémi et
François qui ont conçu et fabriqué le robot. Sur la photo ci-dessous,
on aperçoit Optimousse (le petit) avec le robot Vaimos (le grand).
Year 2011
L'équipe ENSIETA avec le club robotique participe au concours de robotique sous-marine SAUCE
(Student Autonomous Underwater Competition European), La Spezia, Italie. (4ième place).
Vaimos
Olivier Ménage, alors qu'il était étudiant à l'ENSTA-Bretagne a convaincu
sa tutelle IFREMER d'en construire un pour faire
de la mesure en mer. Dans le cadre de son PFE, il a construit (avec Patrick Rousseau
et sous la responsabilité de Thierry Terre) un bateau complet en moins de quatre mois.
Le résultat est impressionnant.
Voir également la
WebTV. A la fois,
pour l'architecture mécanique et électronique, ils se sont débrouillés seuls.
Vaimos s'est montré le robot voilier le plus abouti de l'époque.
C'est sur les algos de commande et sur l'architecture logicielle que nous
les aidons. Ce dernier point montre qu'un des points forts de l'école réside
dans la robotique marine.
First attempt pour Breizh Spirit
La première tentative de la traversée de l'atlantique a été faite fin septembre 2011 pour BS2.
Il semble que le bateau n'ait pas été en direction de son premier waypoint. De plus en
moins de 24h, le foc a lâché, le servo-moteur du gouvernail a pris l'eau, les
batteries se sont vidées anormalement, les panneaux solaires ont été détruits
par l'eau salée (problème d'étanchéité), une écoute est sortie de sa poulie.
Toutes ces défaillances ont empêché le robot de suivre sa mission. Il n'a pas
franchi la ligne de départ mais a montré de bonnes performances (comme le
montre les messages spot envoyés toutes les 8 heures). Dommage qu'il n'existe pas de
log files pour analyser en détail ce qu'il s'est réellement passé.
Year 2010
Nous participons au concours de robotique sous-marine SAUCE
(Student Autonomous Underwater Competition European), La Spezia, Italie. (3ième place).
Notre originalité est l'algorithme de localisation illustré par la vidéo suivant qui montre
notre robot Saucisse se localise dans le petit bassin de l'école.
En parallèle, nous nous interessons pour la première fois à la régulation des voiliers sur foils
avec les étudiants Marc L'Emaillet et Brieg Thiery qui sont alors en stage de PFE en robotique à l'ENSTA Bretagne.
Voir le Blog associé.
Tentative du tour de Ouessant pour le robot voilier Breizh Spririt
La première tentative du tour de Ouessant a été
un échec. Le bateau a relativement bien navigué pendant une quinzaine
d'heures. Mais le mat, déjà fragile, s'est cassé à sa base et le bateau s'est peu à peu rempli
d'eau. Heureusement il a été repêché, par Erell Pellé 24 heures après son départ.
Pour la deuxième tentative c'est à nouveau un échec. Mais nous avons de belles
vidéos.
Mini J de l'école navale
De son côté, l'école navale (Frédéric Hauville (responsable),
Matthieu Sacher (stagiaire), Clément Aubry (doctorant
en robotique)) a réussi à construire une plateforme mécanique robuste : ERWAN 1.
Leur robot a navigué en autonomie et sans capteur de vent. Il était
capable de faire un circuit complet à partir de waypoints devant des visiteurs.
Malheureusement, il a également échoué lors de la traversée de l'Atlantique après
une semaine de navigation en autonome.
Year 2009
Our robot Saucisse has participated to the competition SAUCE 2009.
L'équipe du club robotique participe au concours de robotique sous-marine SAUCE
(Student Autonomous Underwater Competition European), Portsmouth, England.
Nous obtenons la 2ième place.
Below is a video which presents our robot Saucisse.
Breizh Spirit
Breizh Spirit est le nom du premier voilier de l'ENSTA-Bretagne. Il a été conçu et fabriqué par des
étudiants et doctorants de l'école. L'objectif est de faire la traversé de l'atlantique
(la Microtransat). Il s'agit d'une collaboration ENSIETA et Ecole navale.
Les algorithmes de contrôle, l'électronique, etc ont été principalement conçus par Pierre-Henry Reihac.
Plus d'informations se trouvent sur son rapport.
Les premiers tests se sont faits au lac de Ticolo à St Renan.
We participated to the microtransat meeting for the first time. The competition took place in Portugal.
We shared the third place with other teams.
Traversée de la rade de Brest
Nous entreprenons de faire la traversée de la rade de Brest de façon autonome
afin d'attirer les sponsors.
Avec nos partenaires de l'école navale, nous avons fait la une du télégramme de Brest.
Simulateurs
Afin de valider les algorithmes de commande et de navigation,
nous avons développé pas loin de 10 simulateurs pour robots voiliers.
Voir par exemple
quelques Simulateurs 2D
fonctionnant sous Scilab, chacun devant valider une conception ou une stratégie précise.
Simulateur 3D sous QT
pour le suivi de ligne avec les codes sources sous QT avec visu 3D.
En effet, avant d'implémenter les algorithmes de contrôle sur les voiliers,
nous les testons systématiquement sur simulateurs puis sur des robots buggy,
sur le terrain de foot de l'ENSTA-Bretagne.
Year 2008
Nous avons participé au concours SAUCE'08 qui s'est tenu à Brest
Dans la vidéo qui suit, on voit notre robot Saucisse qui valide la gate.
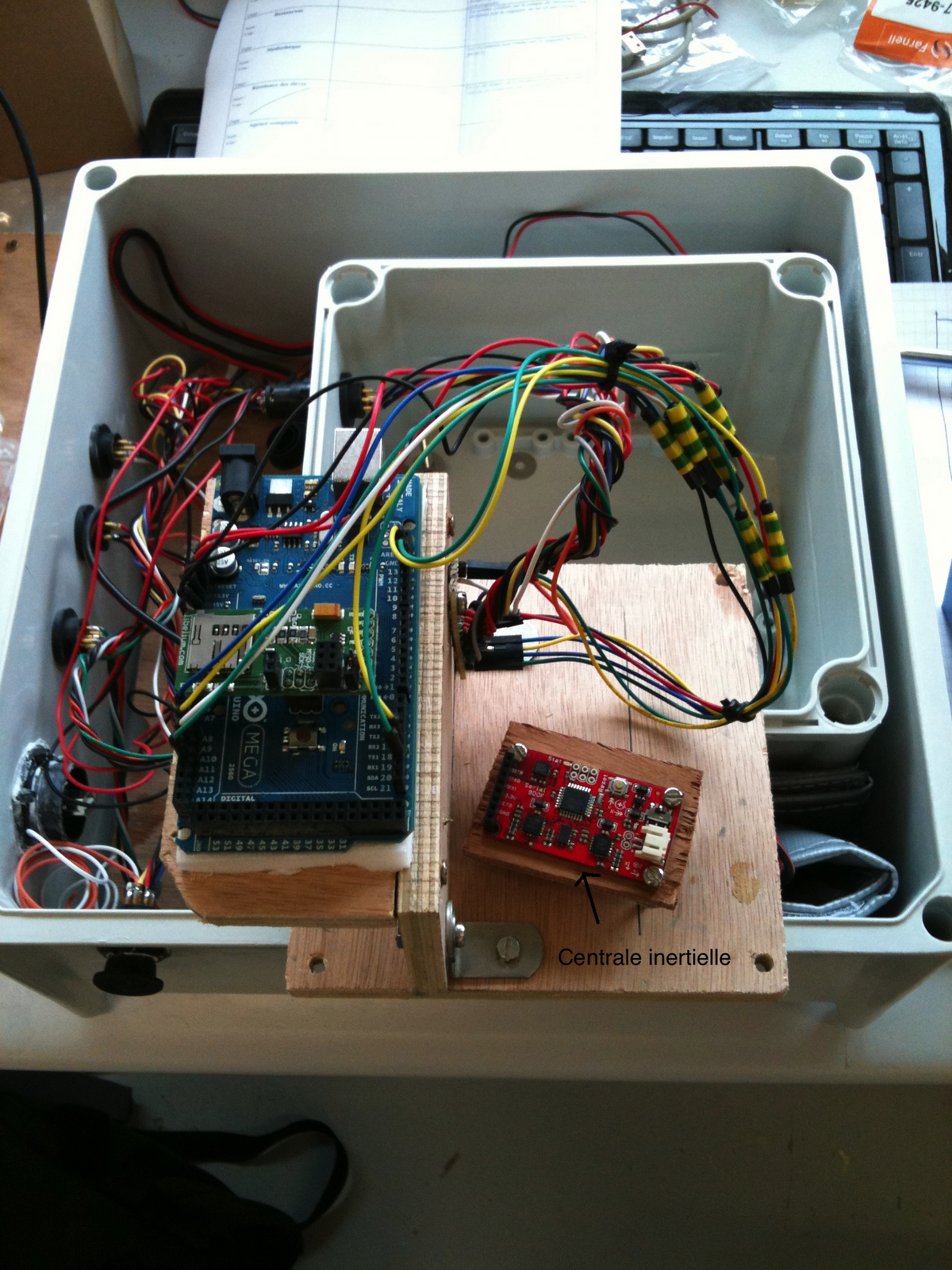
Nous avons travaillé avec des petites centrales inertielles afin de stabiliser une caméra à l'aide d'un mécanisme de
type Pan and Tilt (Arunas Mazeika).
L'objectif final était de fusionner des données radar avec celle de la vidéo pour améliorer la sécurité dans
la conduite automobile.
Year 2007
SAUCE.
L'équipe ENSIETA participe au concours de robotique sous-marine SAUCE
(Student Autonomous Underwater Competition European), Portsmouth, England. Nous
obtenons la 3ième place.
Concours ETAS. Quand au concours ETAS, c'était la dernière édition et nous sommes à nouveau arrivés deuxièmes
derrière l'équipe Thales qui avait deux robots qui collaboraient. L'équipe Thales était dirigée par Thomas
Auzanneau, qui l'année précédente était le président étudiant du club robotique de l'ENSIETA.
Year 2006
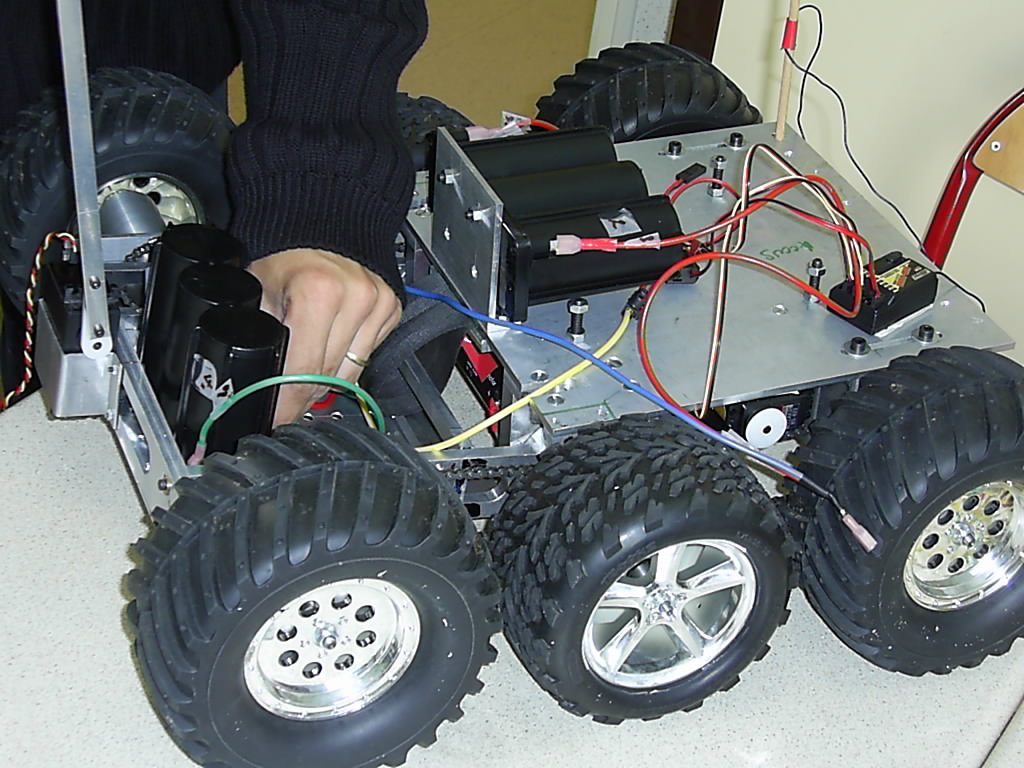
Nous avons participé à nouveau au concours de robotique terrestre ETAS (Angers) et nous obtenons la
deuxième place, juste derrière l'ISTIA Angers (au milieu dans les photos ci-dessous).
WRSC. En parallèle, nous commençons à nous intéresser aux robots voiliers. De tels
robots sont intéressant car ils sont autonomes en énergie.
Tout comme les robots planeurs, ils recherchent leur énergie de propulsion dans
leur environnement.
Nous nous sommes bien évidemment influencé des travaux de Yves Brière, qui avait organisé le
Microtransat Meeting 2006
qui était l'ancêtre de la WRSC.
Ce meeting s'est tenu en France près de Toulouse. Après discussions avec Yves Brière et une
rencontre avec l'école navale (Frédéric Hauville et Patrick Bot), nous avons
décidé de nous lancer dans la fabrication d'un robot voilier en commun pour
effectuer la traversée de l'Atlantique dans le cadre du challenge microtransat.
Nous avons réussi à convaincre nos tutelles qui ont alors financé le projet. L'ENSIETA
devait s'occuper de l'électronique et du contrôle et l'Ecole navale devait
s'occuper de la partie mécanique. Côté ENSIETA, nous avons formé une équipe
avec enseignants (Kostia Roncin (archi-nav), Benoît Clément (automatique), Yvon
Gallou (électronique), Bruno Aizier (grosse expérience dans la fabrication de
voilier), Olivier Reynet (logiciel), Luc Jaulin (robotique)), des doctorants
(Jan Sliwka (robotique), Fabrice Le Bars (informatique)) et des étudiants
(Richard Leloup (mécanique), Pierre Henri Reilhac (électronique), Henry de
Mallet (électronique)), et bien évidemment des nombreux étudiants du club robotique
ultra motivés. Nous avons aboutit à un robot nommé Breizh Spirit. Un étudiant de
l'ENSIETA (Olivier Ménage, FIPA) qui a suivi le projet a également développé un robot
voilier à IFREMER : Vaimos.
Year 2005
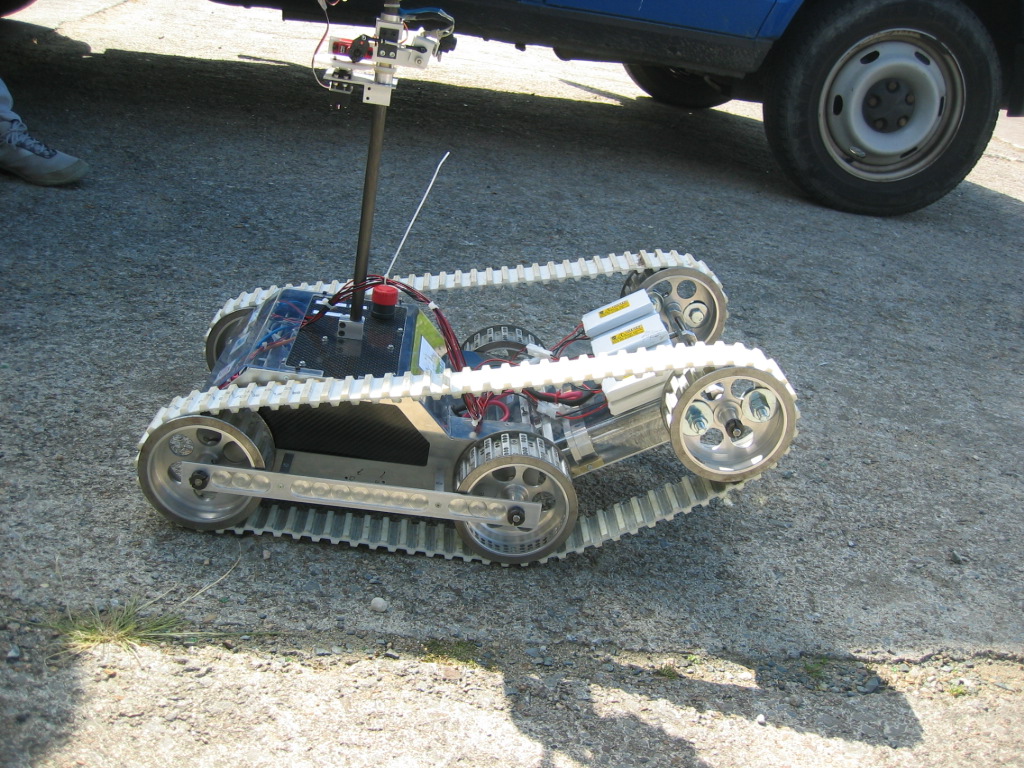
Nous participons au concours de robotique terrestre ETAS (Angers) et nous obtenons la
première place. Voir l'article de l'école..
Les photos ci-dessous montre notre robot (fait à l'aide des mécaniciens), le PC 104 et le club robotique de l'époque.
Ci dessous les photos prises le jour du concours à Angers.