|
|
|
|
|
|
|
|
|
|
|
|
|
|


Les AUV de Kopadia peu avant le départ lors de Submeeting'2018 |

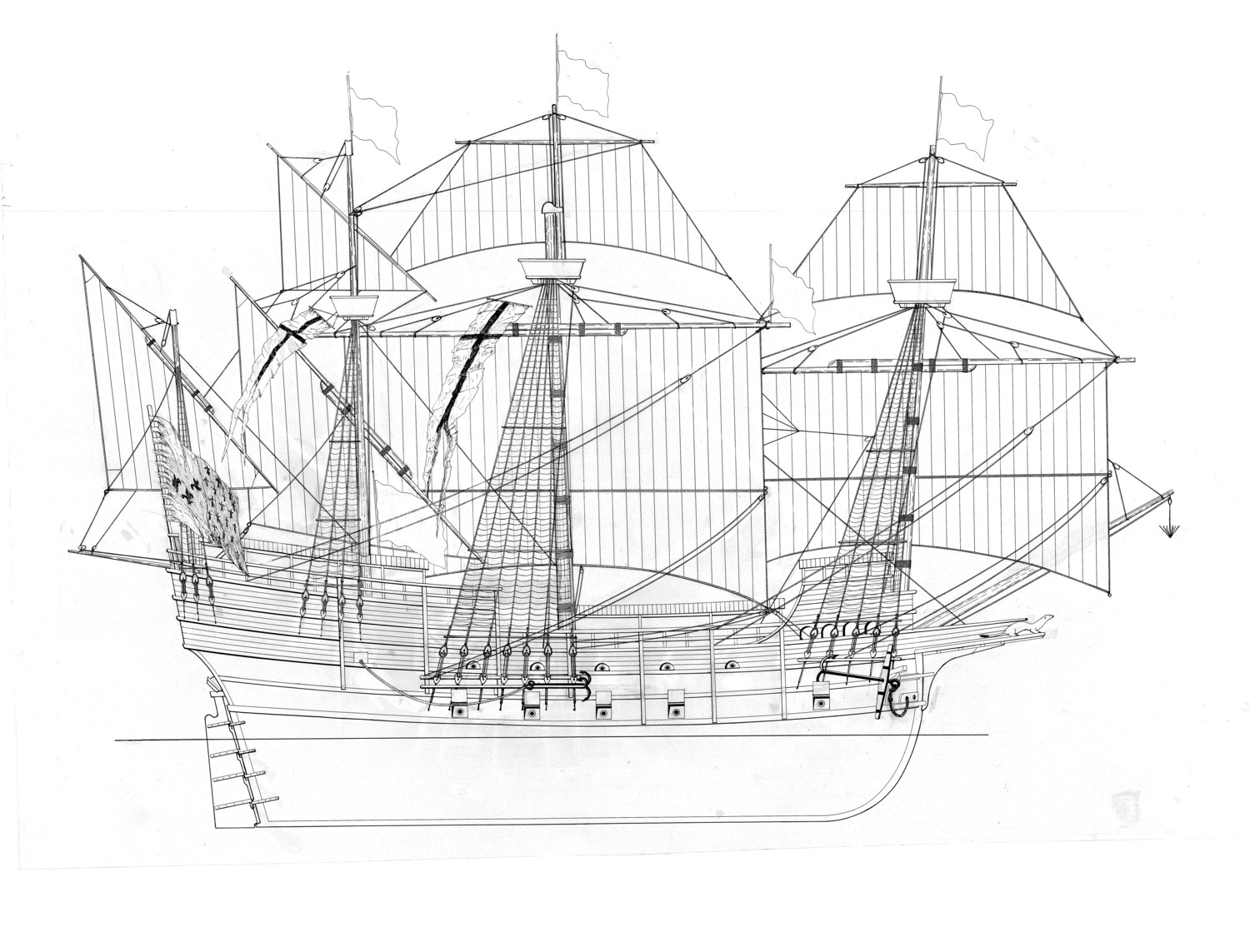
Boatbot à la recherche de la Cordelière |
| Nom | Type | Responsable | Laboratoire/entreprise |
|---|---|---|---|
| Boatbot | Zodiac autonome | Joris Tillet | ENSTA-Bretagne, Lab-STICC |
| Blerre | ROV | ?? | Blue Robotic - ENSTA-Bretagne |
| Blain | ROV-Sonar | Alain Bertholom | Blue Robotic - ENSTA-Bretagne |
| Blosh | ROV | Josh Francis | Blue Robotic - ENSTA-Bretagne |
| Vaimos | Robot voilier | Fabrice Lebars | Ifremer - ENSTA-Bretagne |
| Brave | Robot voilier | Fabrice Lebars | ENSTA-Bretagne |
| Folaga | AUV | Julien Damers | Kopadia |
| Ulysse | Catamaran autonome | Alain Bertholom, Romain Schwab | Texis-marine, ENSTA-Bretagne |
| YODA | USV docker | Auguste Bourgois | FORSSEA, ENSTA-Bretagne |
| LABRAX | AUV | Alexandre Lefort | Syrehna |
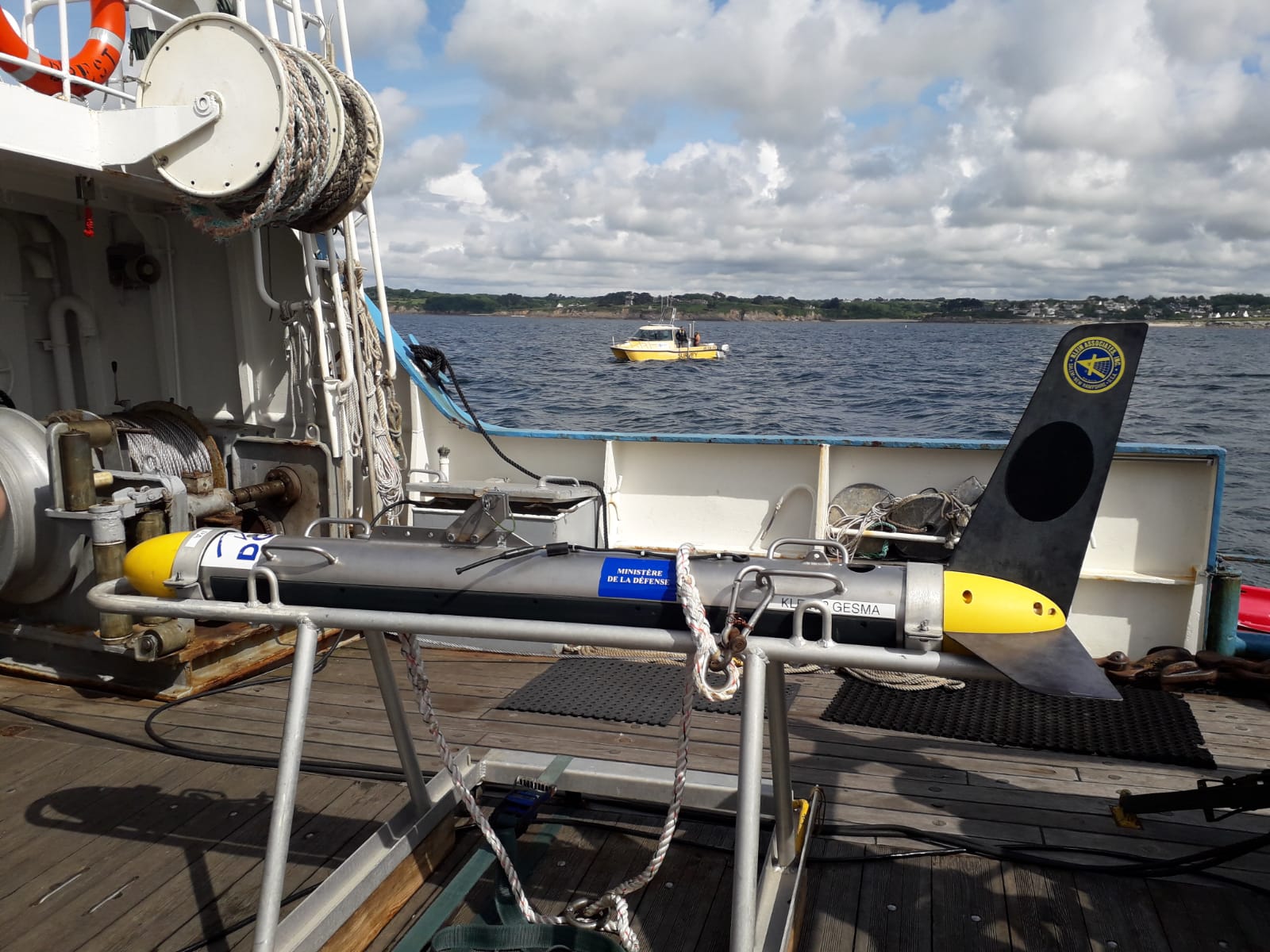
| AUV-I | AUV | Ronan Scieur | DGA-TN |
| Sea Wolf | ROV | Ronan Scieur | DGA-TN |
| BODAMM | AUV | Florian Tanguy | RT-Sys |
| SeaBot | Flotteur | Thomas Le Mézo | ENSTA-Bretagne |
| Matrice 600 | Flotteur volant | Jérôme Ammann | IUEM |

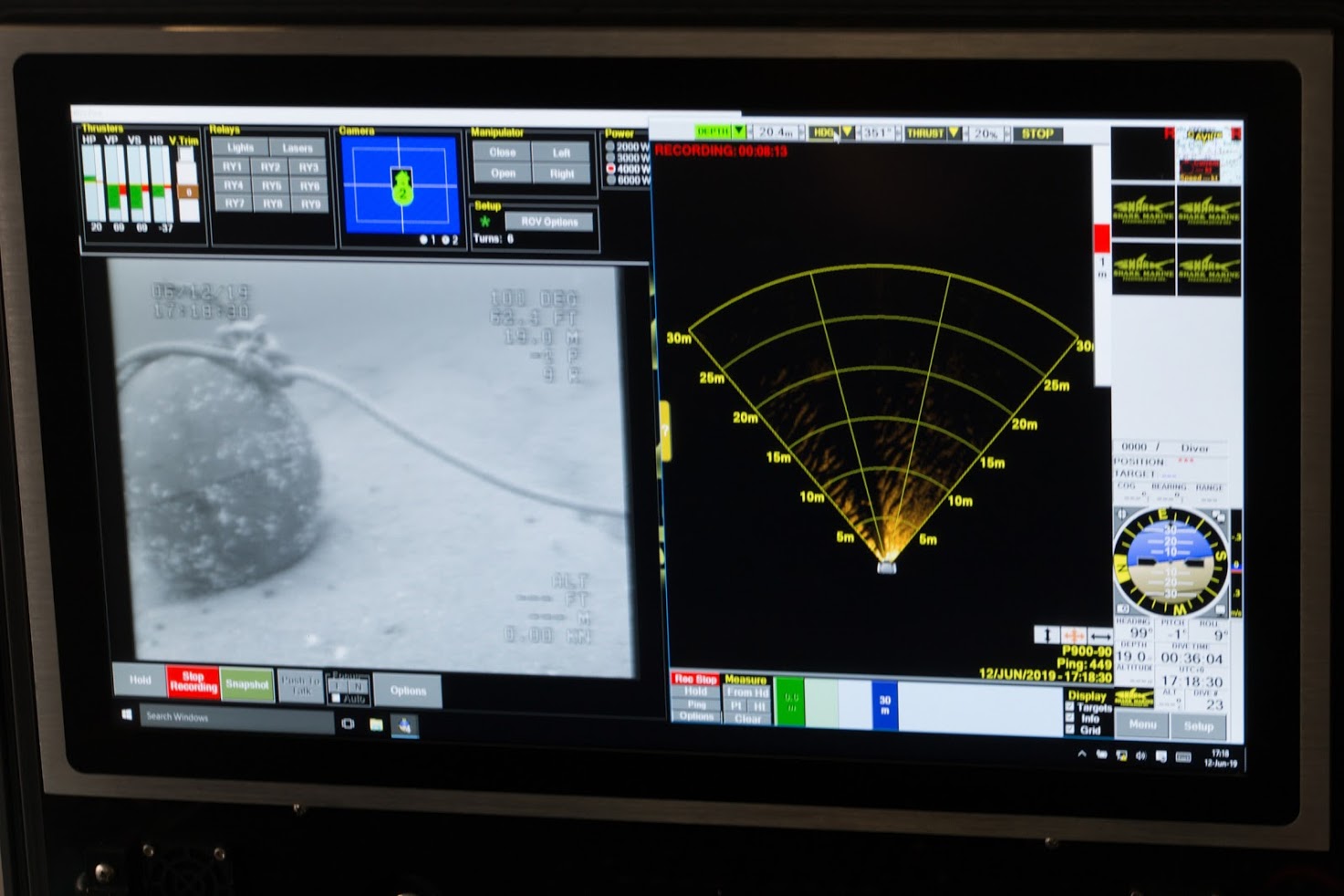
AUV-I autonome, capable de faire un relevé bathymétrique |

ROV |

AUV BODAMM, RT-Sys |
Transpondeur (couplé au GAPS) |

Le robot Ulysse (ici à Guerlédan) sera présent à Submeeting'2019 |

Le voilier Brave qui a gagné la WRSC'18, à Southampton |

YODA, ici à Submeeting'2018 |
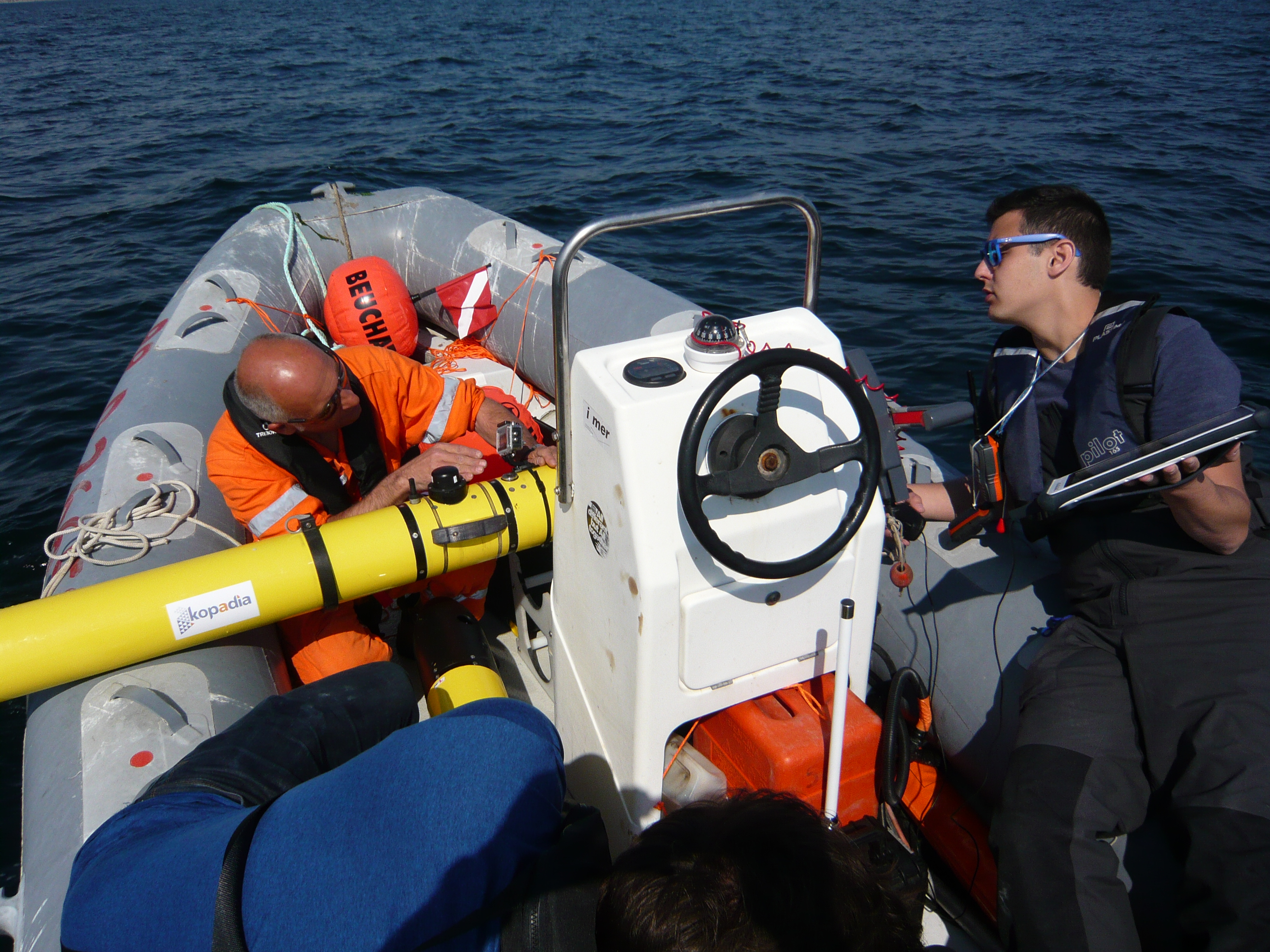
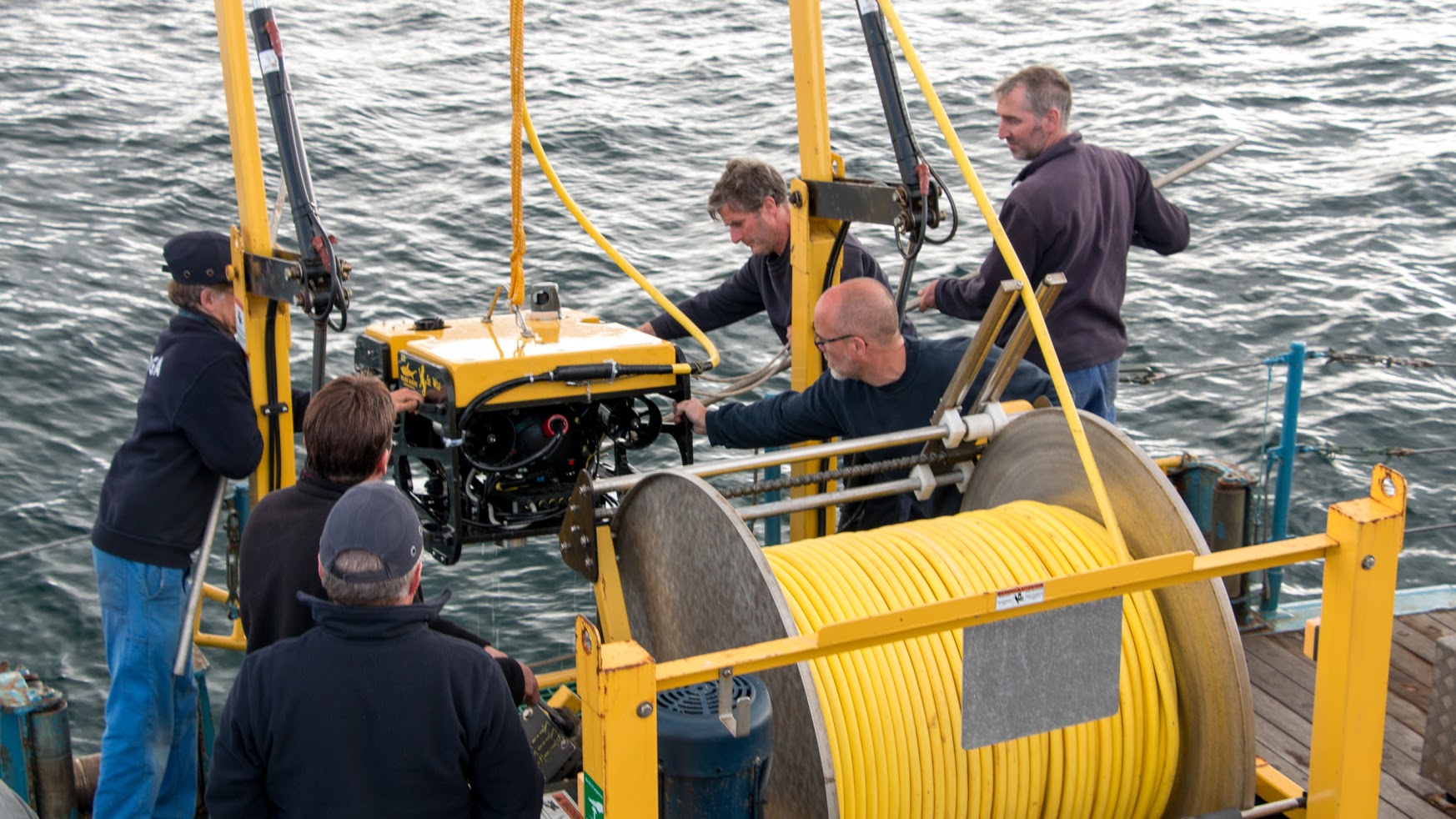
Mise à l'eau d'un AUV |

Vaimos lors de la mission Brest-Douarnenez |
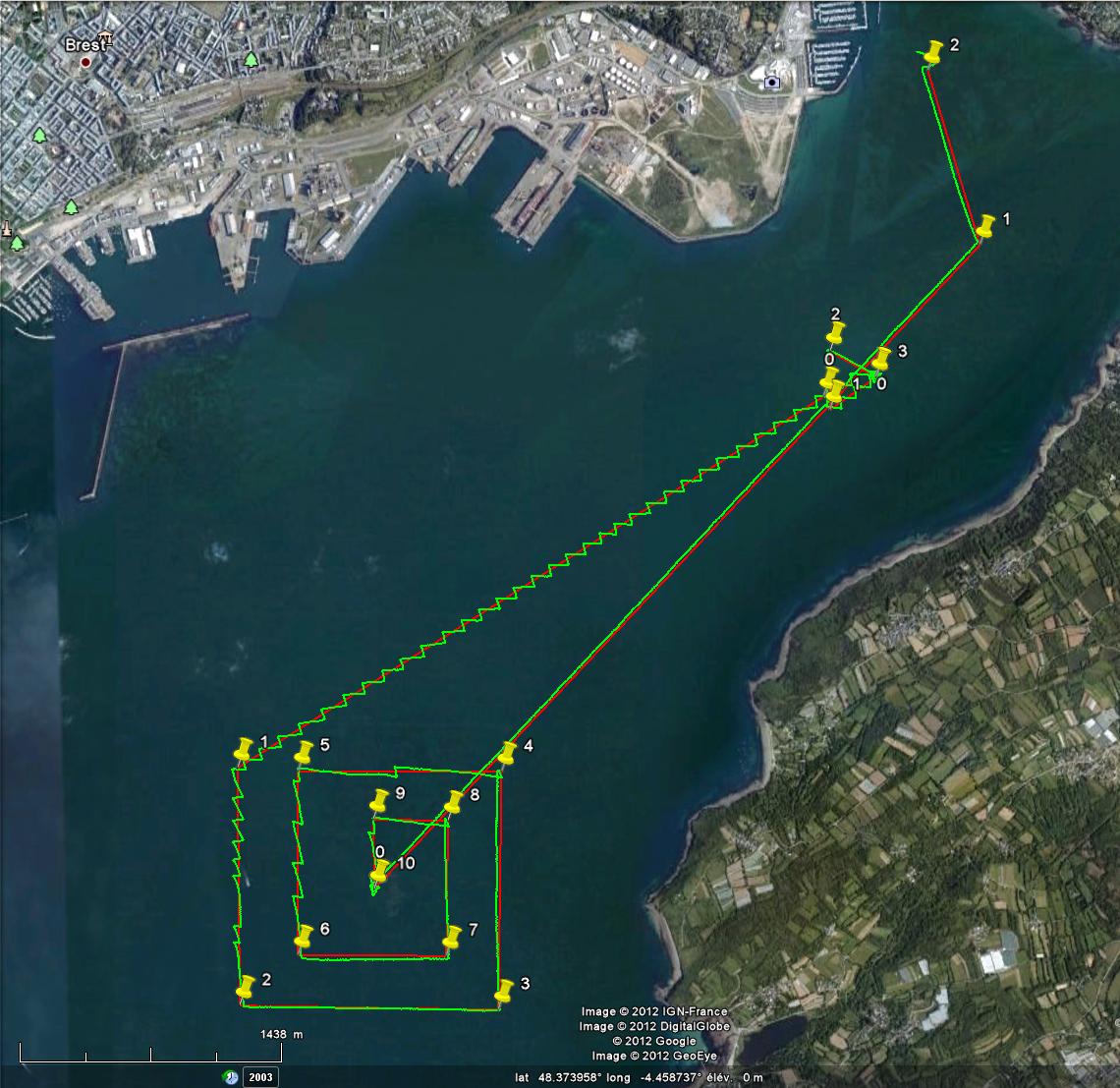
Trajectoires suivies par Vaimos |

Mise à l'eau de Blerre |

Matrice 600 (IUEM/ENSTA) |

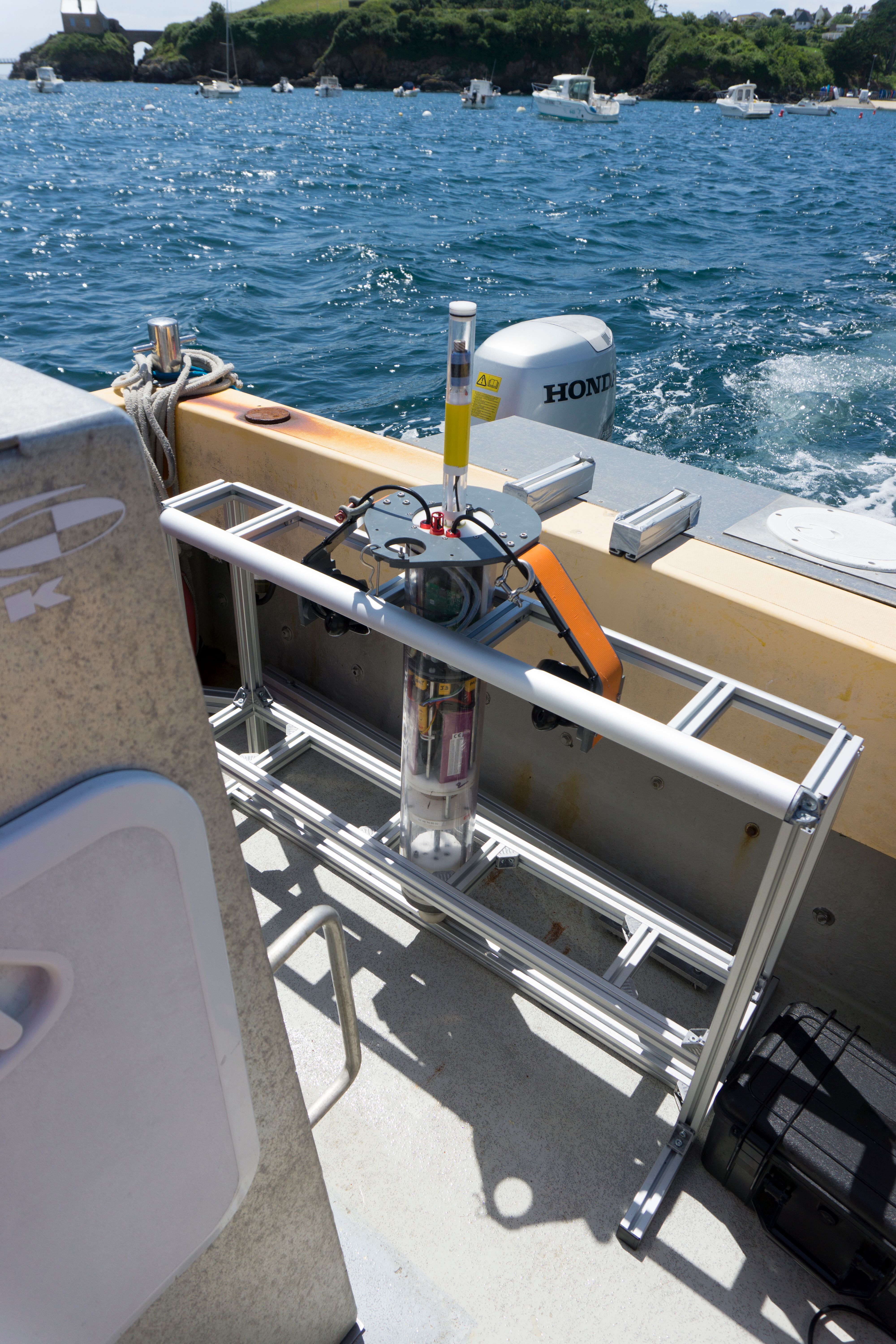
Flotteur SeaBot |

GAPS |
| Nom | Type | Responsable | Laboratoire/entreprise |
|---|---|---|---|
| Aventurière | Chalutier | Ronan Scieur | DGA-TN |
| Panopé | Vedette | Pierre Simon | ENSTA-Bretagne |
| Marloux | Vedette | Olivier Ménage | Centre nautique du Moulin Blanc |
| Zodiac 1 | Zodiac | Luc Jaulin | Centre nautique du Trez-Hir |
| Zodiac 2 | Zodiac | Annick Billon-Coat | Centre nautique du Trez-Hir |

|

|

|

|
|
|
 Annick Billon-Coat ENSTA-Bretagne annick.billon-coat @ensta-bretagne.fr |
 Vincent Creuze LIRMM |
 Luc Jaulin ENSTA-Br / Lab-STICC lucjaulin@gmail.com tél. 06 82 99 00 41 |
 Benoît Zerr ENSTA-Br / Lab-STICC benoit.zerr@ensta-bretagne.fr |
 Fabrice Le Bars ENSTA-Br / Lab-STICC fabrice.le_bars@ensta-bretagne.fr |
 Michel L'Hour DRASMM |
 Olivia Hulot DRASSM |
 Irène Mopin ENSTA-Bretagne, Lab-STICC |
 Romain Schwab ENSTA-Bretagne, Lab-STICC |
 Simon Rohou ENSTA-Bretagne, Lab-STICC |
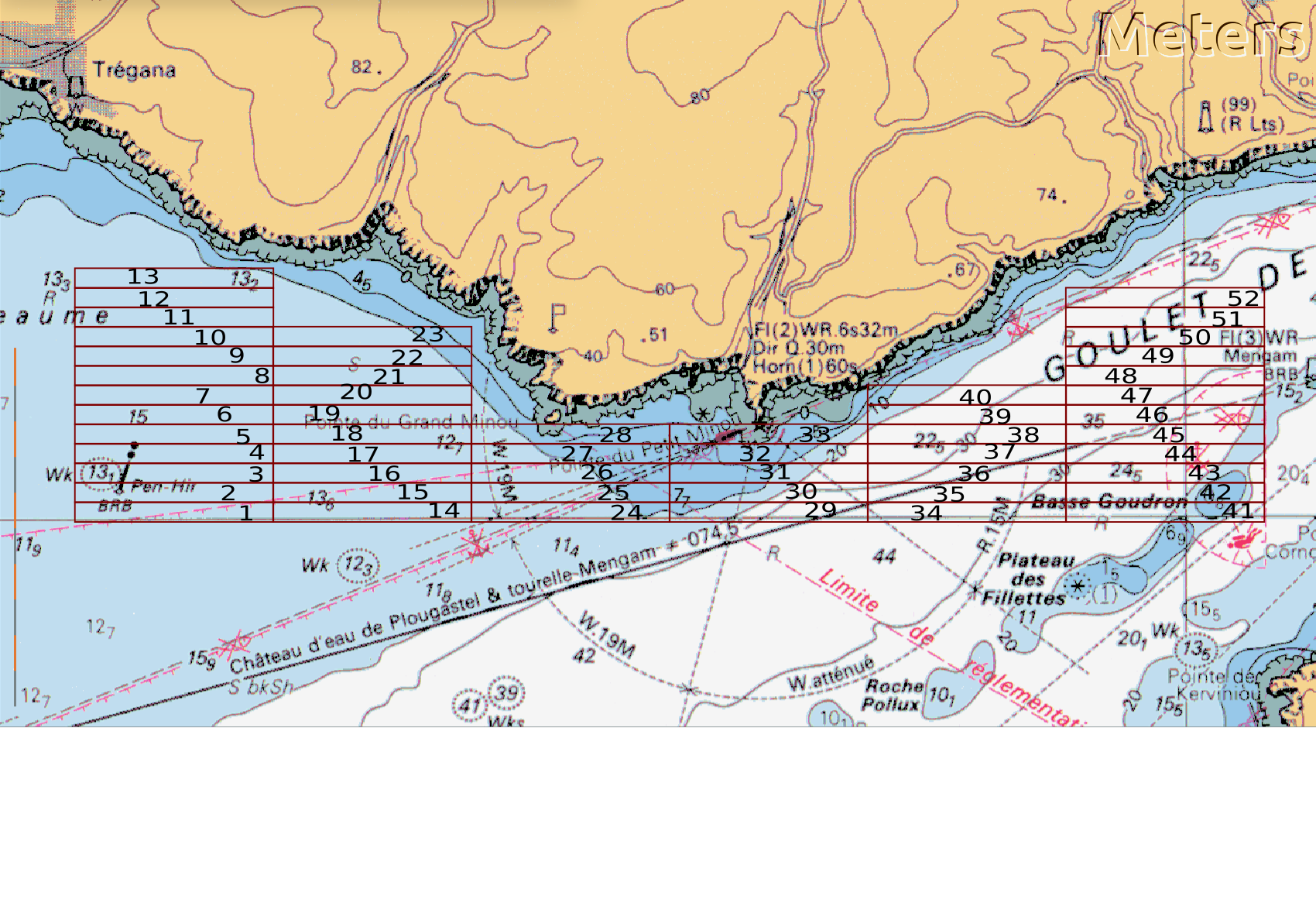
Les 52 briques que nous devons explorer
| Latitude | Longitude |
| 48.343872717 | -4.685302005 |
| 48.345279285 | -4.664346569 |
| 48.330974036 | -4.661923985 |
| 48.329088344 | -4.683404221 |
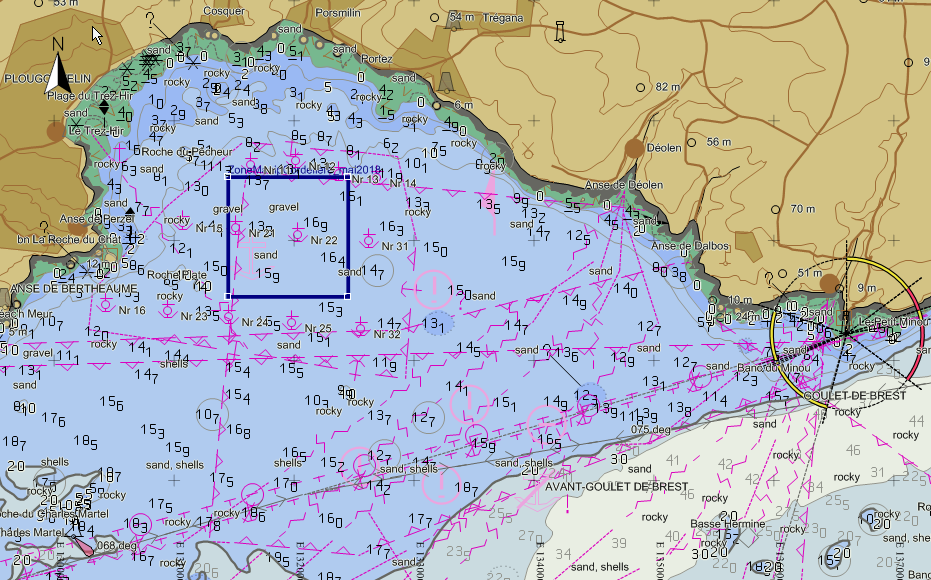
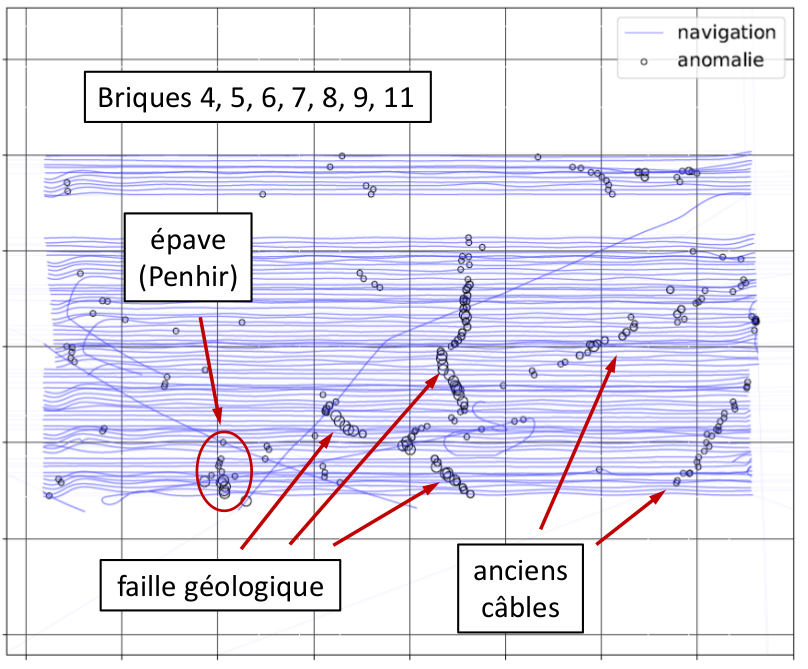
La carte magnétique du fond marin obtenue par Boatbot a été présentée lors de la SeaTechWeek dans
le cadre du workshop MOQESM 2018





















Vaimos