MOQESM'2018
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MOQESM est un des workshops satellites de la Sea Tech Week.
MOQESM se tiendra à Brest, au Quartz, les 8, 9 et 10 octobre 2018.
![]()
MOQESM'2016 :
![]()
MOQESM'2014 :
![]()
Les tarifs d'inscription à la Sea Tech Week en tant que congressiste sont les suivants :
- Forfait Sea Tech Week (accès à tout Sea Tech Week) : 300 TTC
- Inscription à la journée : 150 TTC / jour
- Inscription étudiante : 10 TTC
Ce tarif inclut : L'accès aux conférences de la Sea Tech Week, au salon professionnel et aux rendez-vous B2B.
Le programme complet de la semaine ou de la journée Le cocktail déjeunatoire du mardi midi
Prestations complémentaires : Déjeuners : 25 - 27 TTC / Déjeuner Soirée de gala : 35 - 40 TTC
Les journées du 8 et 9 octobre seront en français et s'intéresseront à la robotique sous-marine et/ou à l'archéologie sous-marine. Le 9 octobre, à 14h00 nous aurons le plaisir d'écouter la présentation invitée du Professeur Oussama Khatib de Stanford University (USA),
Le 9 octobre, à 14h30 nous aurons le plaisir d'écouter la présentation invitée du Professeur Oussama Khatib de Stanford University (USA), qui présentera le robot sous-marin humanoïde Ocean One.

Cette demi-journée s'adresse à un public fait de scientifiques, d'ingénieurs et d'industriels qui ont un lien avec la robotique sous-marine. Les présentations sont en français.
13h30.
Explorer et revenir pour un robot sous marin avec un échosondeur pour unique capteur extéroceptif (Luc Jaulin)
![]()
14h00.
CANOPUS, La solution de positionnement acoustique sous-marine globale (Pierre François Adam, iXblue)
![]()
14h30.
Planification d'une stratégie robuste de revisite d'un objet avec un robot sous-marin 'low cost'
en se basant sur une carte (Thibaut Nico, ECA Robotics, ENSTA-Bretagne)
![]()
15h00.
'A18D' AUV multi-senseurs pour l'exploration grand fond (Sébastien Tauvry, ECA).
15h30.
Docking automatique entre deux robots marins : une approche par champs de vecteurs (Auguste Bourgois, Forssea Robotics, ENSTA-Bretagne)
![]()
16h00. Pause café.
16h30.
Navigation coordonnée de cordée de robots sous-marins (Claire Dune, COSMER Toulon)
![]()
17h00. Recherche d'objets archéologiques à partir de données multicapteur (Isabelle Leblond, Ecole navale)
![]()
17h30. Intérêt des solutions multi-drones pour des applications industrielles,
problématique du positionnement pour l'exploration grande profondeur. (Kopadia Thierry Grousset)
![]()
Pour la journée du 9, tout est en français et s'adresse à un large public, avec des historiens,
des archéologues et des ingénieurs. Le sujet traité est l'archéologie et la robotique sous-marine.
09h00. La robotique pour l'archéologie à travers quelques exemples. (Vincent Creuze)
09h30. A la recherche d'une épave symbolique: la Cordelière.
Des archives aux robots, approche pluridisciplinaire (Michel L'Hour et Olivia Hulot, DRASSM)
![]()
10h30. Pause café
11h00. La cartographie magnétique de l'environnement côtier et ses applications (Jean-François Oehler)
![]()
11h30. Recherche d'épaves par un zodiac autonome tractant un magnétomètre : premiers résultats et perspectives (Romain Schwab)
![]()
12h00. Boatbot,
un zodiac autonome pour le recherche d'épaves (Maël Le Gallic)
![]()
12h30. Repas
14h00. Moyens et méthodologies mis en oeuvre sur la Cordelière. (Luc Jaulin)
![]()
14h30. Ocean One
(Oussama Khatib, Stanford University).
15h30. Le projet SEAHAND pour l'archéologie sous marine (Jean-Pierre Gazeau, Institut Pprime).
16h00. Pause café.
16h30.
SLAM monoculaire pour la navigation des robots sous-marins dans le contexte archéologique
(Maxime Ferrera, thèse Onera/Lirmm/Drassm).
![]()
17h00. Cartographie et analyse de l'épave du Furieux en Rade de Brest (Irène Mopin)
![]()
17h30. Zone du naufrage de la Cordelière (morphologie, dynamique, sédimentologie) (Axel Ehrhold)
![]()
18h00. Archéologie sous-marine amateure, évolution et technologie. (Thierry Normant)
![]()
18h30. HROV et ses opérations sur épave et en archéologie (Viorel Ciausu, Ifremer)
![]()
The organizers of this session are Benoît Clément and the Ocean University of China.
This session is dedicated to control theory with applications to underwater robotics.
All presentations and discussions will be in English.
09h30. Accueil Benoît Clément
09h45. Modelling and Control for Oscillating Water Column Wave Energy Converter (LI Ming)
10h05. Underwater 3D reconstruction based on multi-spectral photometric stereo (DONG Junyu)
10h25. Hardware in the loop simulation Applied to AUV control (YANG Rui)
10h45. Coffee break
11h15. Machine learning for robust control of autonomous underwater vehicles (Yoann SOLA)
11h35. A Local Charged Particle Swarm Optimization to track an underwater mobile source (Charles COQUET)
12h00. Repas

Archéologue
Directeur du DRASSM

Archéologue, DRASSM
Responsable de la façade atlantique au DRASSM

Enseignant-chercheur, ISIR, Paris
Il travaille principalement sur la commande des robots voiliers. Il est le responsable du Groupe de travail 'robotique marine et sous-marine' du GDR robotique.

Enseignant-chercheur en robotique sous-marine au LIRMM (CNRS/Univ. Montpellier)
Il travaille sur la perception et la commande, appliquées aux robots sous-marins dans le domaine de l'archéologie et de la biologie

Professeur en robotique
Professeur des Universités dans le domaine de la robotique marine. Il travaille sur le calcul ensembliste avec des applications en localisation sous-marine et cartographie.

Géophysicien marin, Shom
Chargé de recherche au sein du département géophysique du Shom. Il travaille notamment sur l'étude du champ magnétique terrestre et de ses variations spatiales et temporelles. Une des applications est la détection d'objets anthropiques

Secrétaire de laboratoire
Elle organise MOQESM pour la quatrième fois. Elle organise de nombreuses conférences qui se tiennent à Brest comme SWIM, ICOURS, etc.
Archéologue, directeur du DRASSM
A la recherche d'une épave symbolique: la Cordelière. Des archives aux robots, approche pluridisciplinaire
A travers cet exposé, je discuterai, avec Olivia, des aspect historiques de la Cordelière et présenterai une vue globale du projet de recherche et la campagne de survey de cet été.
Archéologue, DRASSM
A la recherche d'une épave symbolique: la Cordelière. Des archives aux robots, approche pluridisciplinaire
A travers cet exposé, je discuterai, avec Michel, des aspect historiques de la Cordelière et présenterai une vue globale du projet de recherche et la campagne de survey de cet été.
Directeur du Stanford Robotics Laboratory, Stanford University
Ocean One: l'archéologue sous-marin du futur.
Cette présentation sera consacrée au robot humanoïde sous-marin Ocean One développé au Stanford Robotics Laboratory, ainsi qu'aux divers concepts scientifiques et technologiques sous-jacents. Cette présentation sera illustrée par divers résultats expérimentaux, dont le déploiement sur l'épave de la Lune, en 2016.
Enseignant-chercheur en robotique sous-marine LIRMM
La robotique pour l'archéologie sous-marine à travers quelques exemples
Cet exposé présentera les exigences de l'archéologie sous-marine et montrera comment les robots peuvent assister les archéologues, en particulier pour l'étude des épaves profondes
Roboticien
Recherche d'épaves enfouies à l'aide de robots sous marins équipés de magnétomètres
Dans cet exposé, je présenterai différentes techniques utilisant des robots que nous avons étudiées pour la recherche
d'épaves enfouies et qui pourraient s'appliquer à la recherche de la Cordelière. Les techniques retenues sont de deux
types :
- celles utilisant des zodiacs autonomes tractant un magnétomètre
- celles utilisant des robots sous-marins capables de communiquer.
Ces techniques proviennent du travail des étudiants de l'ENSTA Bretagne
pendant l'année scolaire 2017-18
Quelques illustrations issues des journées d'expérimentation
Submeeting qui se sont tenues
à la sortie du goulet de Brest en mai 2018 seront données.

Ingénieur en Acoustique et Hydrographie / Ingénieur de recherche à l'ENSTA Bretagne
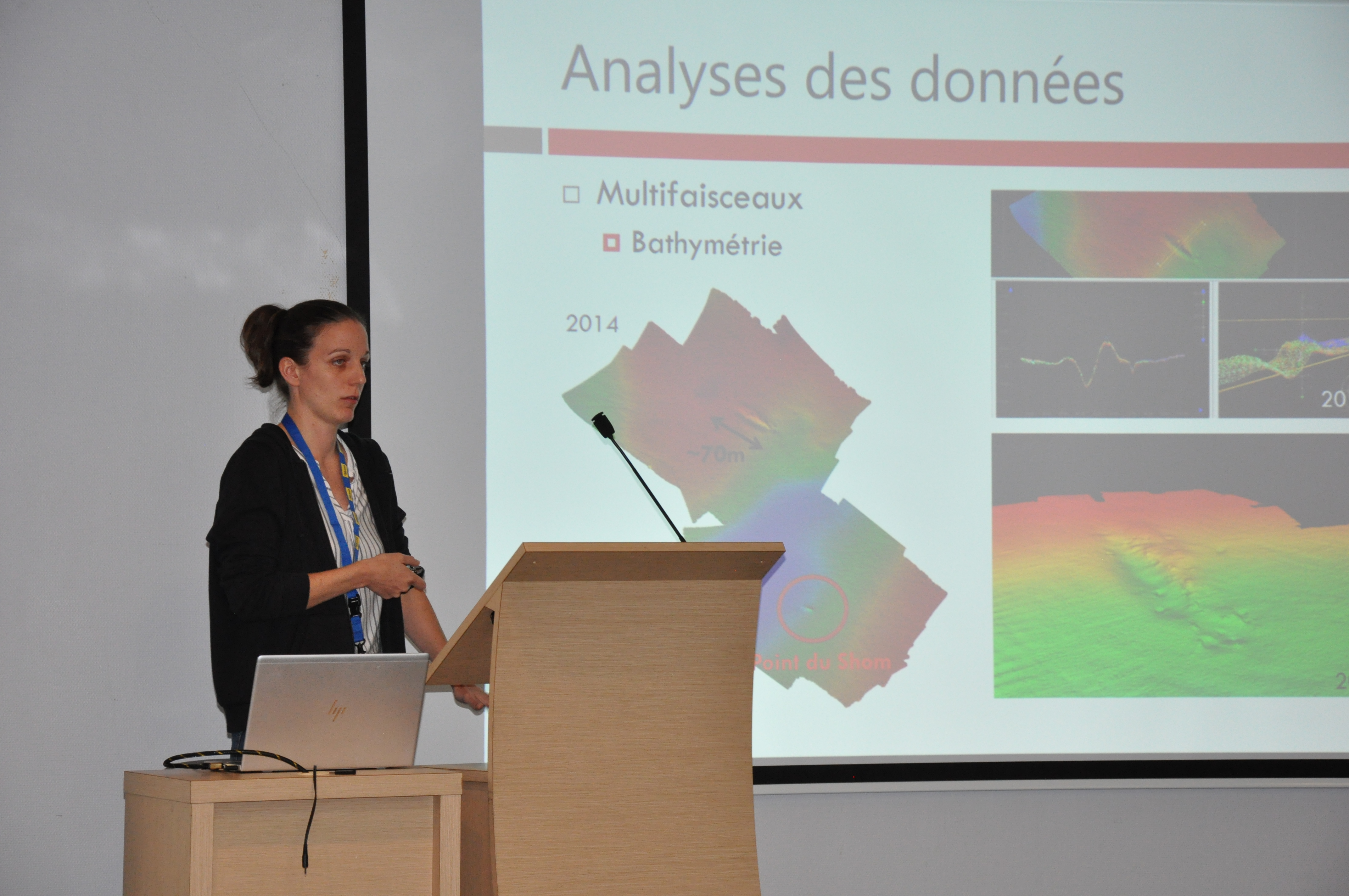
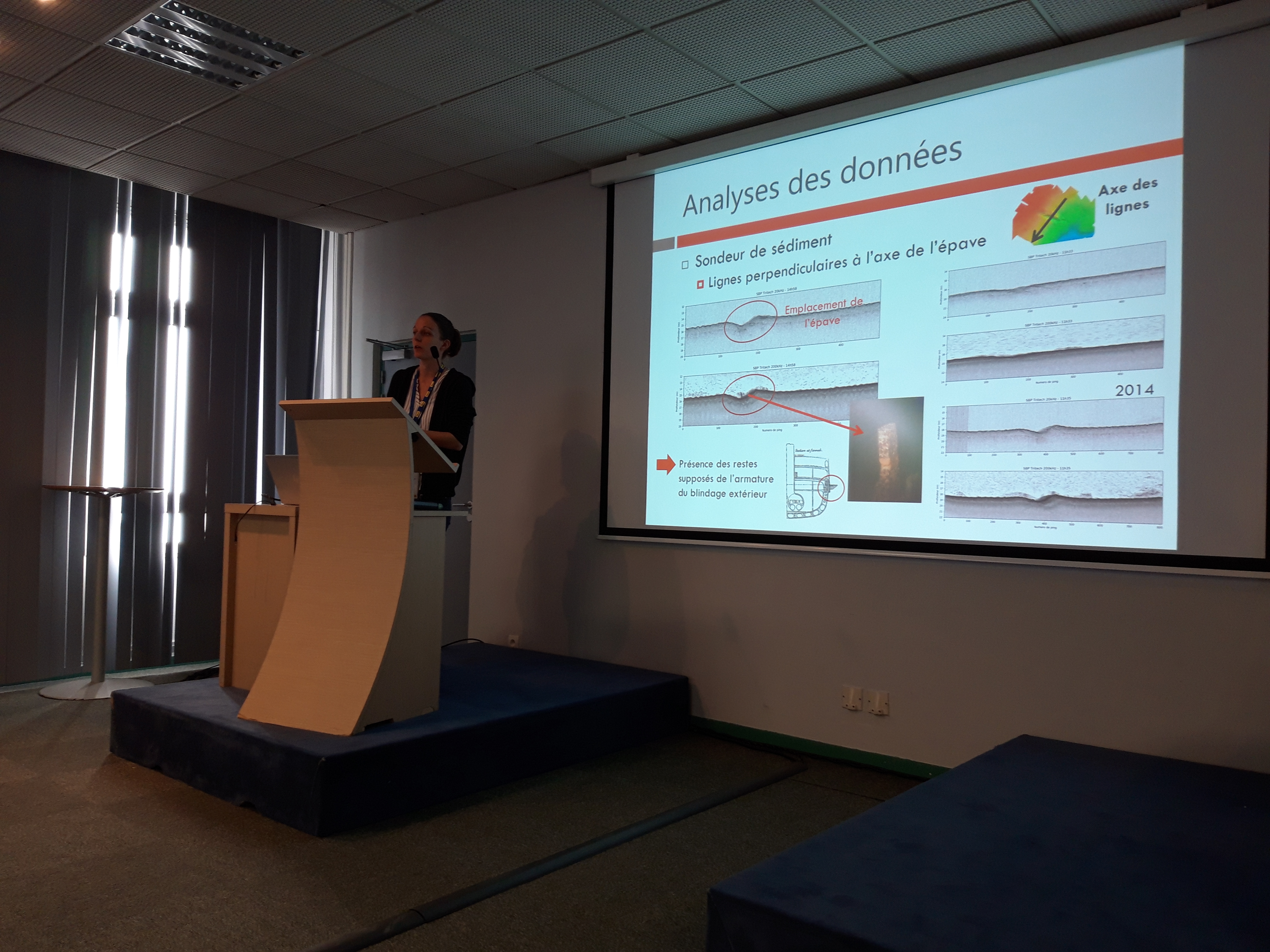
Cartographie et analyse de l'épave du Furieux en Rade de Brest
Le Furieux, construit en 1875, a coulé en 1920 en Rade de Brest alors qu'il était à l'ancre. Aujourd'hui, seule la structure globale et plusieurs objets, enfouis sous le sédiment, sont encore présents. Le projet présenté a permis l'analyse conjointe de données de différents sondeurs acoustiques et de photographies sous-marines, permettant d'extraire la position exacte et l'orientation de l'épave, de modéliser certains objets, et d'étudier et cartographier les restes du navire.
Géophysicien marin, Shom
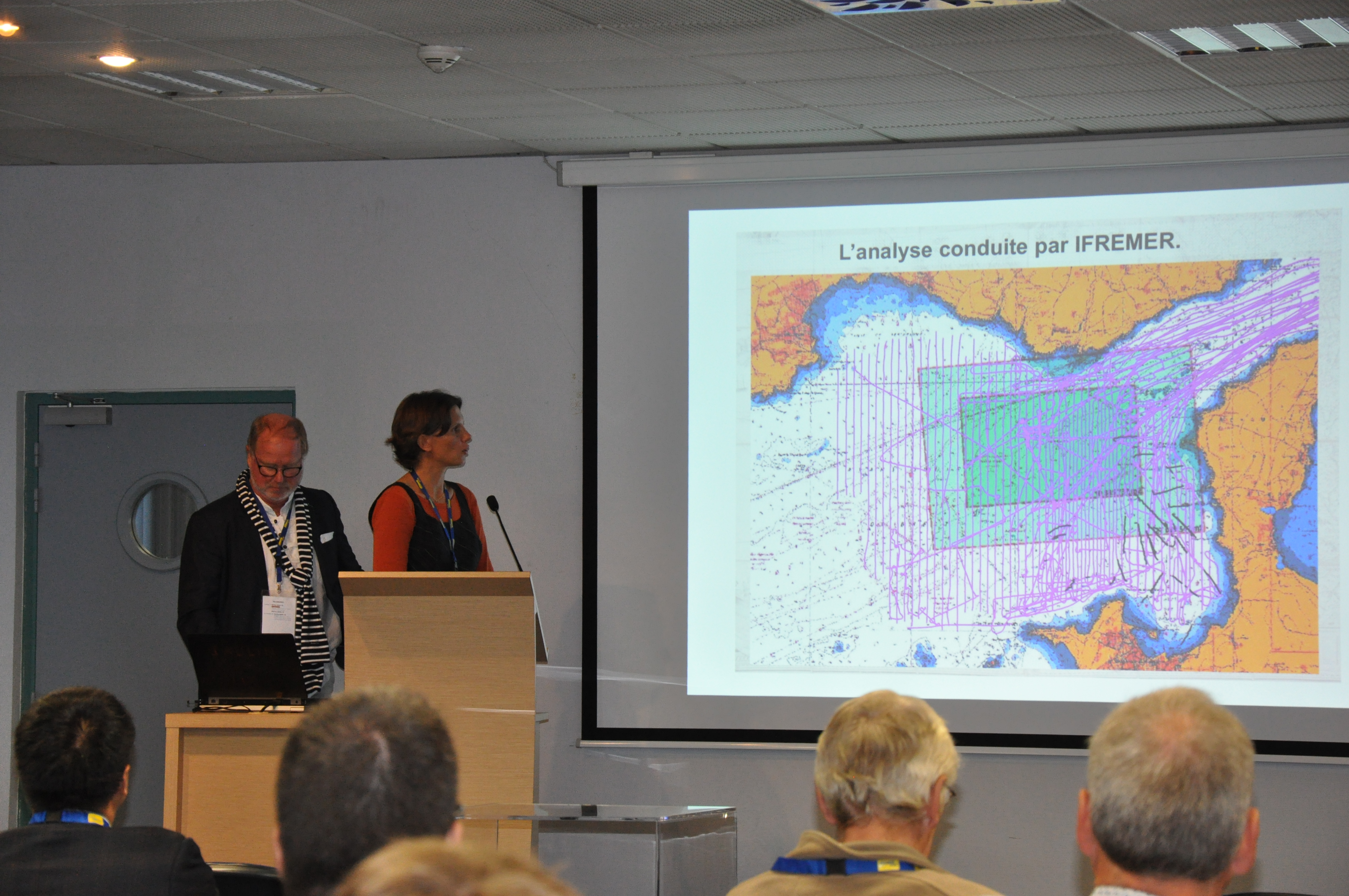
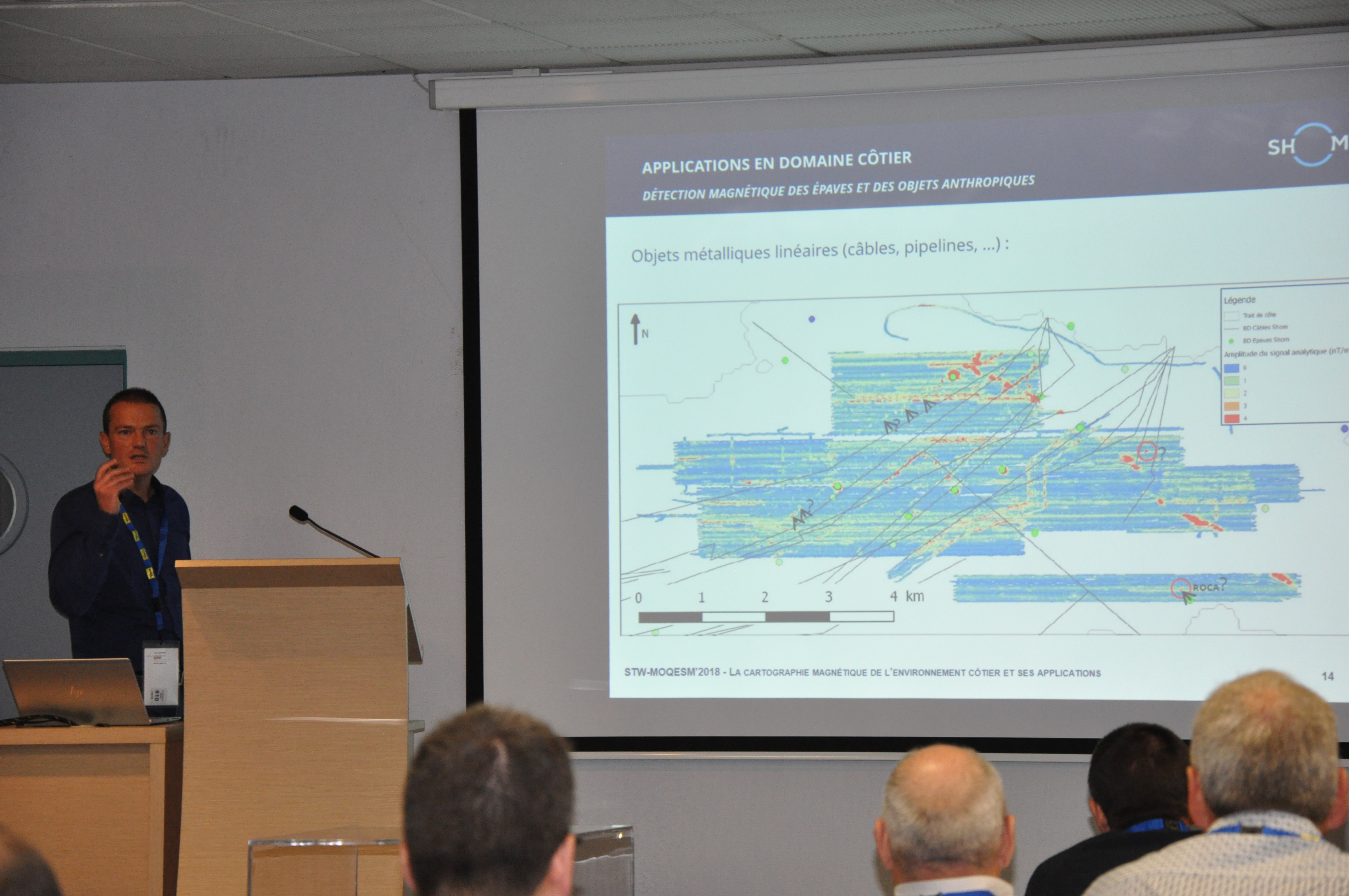
La cartographie magnétique de l'environnement côtier et ses applications
L'idée est d'illustrer en quoi la mesure du champ magnétique terrestre permet de mieux comprendre l'environnement marin en domaine côtier, que ce soit pour la cartographie magnétique du socle rocheux que pour la détection d'objets anthropiques. Je reviendrai succinctement sur quelques notions théoriques sur le géomagnétisme. Je présenterai ensuite l'acquisition et le traitement des données magnétiques marines au Shom, avant d'évoquer plusieurs exemples concrets de l'utilité de ces levés géophysiques.

Ingénieur hydrographe, spécialiste en magnétisme
Recherche d'épaves par un zodiac autonome tractant un magnétomètre : premiers résultats et perspectives
En juillet 2018, le zodiac autonome de l'ENSTA Bretagne, dénommé "boatbot", a mené à bien des opérations de prospection magnétique dans l'anse de Bertheaume et le goulet de Brest. A travers les résultats de cette campagne, nous détaillerons les précautions particulières à c onsidérer pour ce type de levé, les performances atteignables avec un capteur vectoriel tracté et les méthodes de traitement des données. Il sera ainsi possible de répondre sur : la manière dont nous pouvons valoriser les mesures, quelles pistes d'amélioration envisager avant de futurs essais et quelles perspectives en attendre.

Enseignant-chercheur en Acoustique Sous-Marine à l'Ecole Navale
Recherche d'objets multicapteur archéologiques à partir de données multicapteur
De nombreux objets archéologiques, qu'il s'agisse d'épaves ou d'autres objets, sont souvent enfouis dans le sédiment et donc, difficiles à détecter et localiser. Le projet présenté ici propose d'étudier les possibilités d'utiliser plusieurs capteurs pour réaliser cette opération. Lors d'une des journées consacrées à la recherche de la Cordelière, le zodiac autonome 'Boatbot' a tracté simultanément un magnétomètre et un sonar latéral. Nous présentons ici les premiers résultats de cette journée de campagne.

Enseignant-chercheur Laboratoire COSMER, Toulon
Commande référencée vision d'une cordée de robots pour le déploiement de mini-Rov à grande distance de leur base
L'utilisation de ROV nécessite le déploiement d'important moyens humains et matériels. La miniaturisation des charges utiles et la diffusion des nano-ordinateurs ont permis le développement récent de mini-ROV compacts qui peuvent être mis à l'eau depuis une embarcation légère. Ils présentent également l'avantage de pouvoir naviguer dans des eaux peu profondes, inaccessibles aux ROV standards, trop volumineux. Ces systèmes sont prometteurs, cependant, leur faible inertie et leur faible puissance par rapport aux ROV standards, les rend sensibles à la traînée de leur ombilical et limite leur déploiement à quelques dizaines de mètres de leur base. Afin de limiter les effets mécaniques de l'ombilical au cours de l'exploration, nous avons travaillé sur le concept d'une cordée de robots : des mini-rov intermédiaires sont liés à l'ombilical pour contrôler sa forme, leur rôle est d'absorber les efforts appliqués à l'ombilical pour laisser le robot leader explorer son environnement sans perturbation. Nous avons développé une loi de commande qui régule directement les paramètres d'un modèle du câble sous forme de chaînette. Les paramètres sont estimés à partir de la projection d'une portion de l'ombilical dans la vue des caméras nativement embarquées sur le système. La cordée est contrôlée de proche en proche par un contrôleur hiérarchique, dont les priorités dépendent de l'environnement du leader : plein eau, franchissement d'obstacles.

Chercheur Ifremer Brest
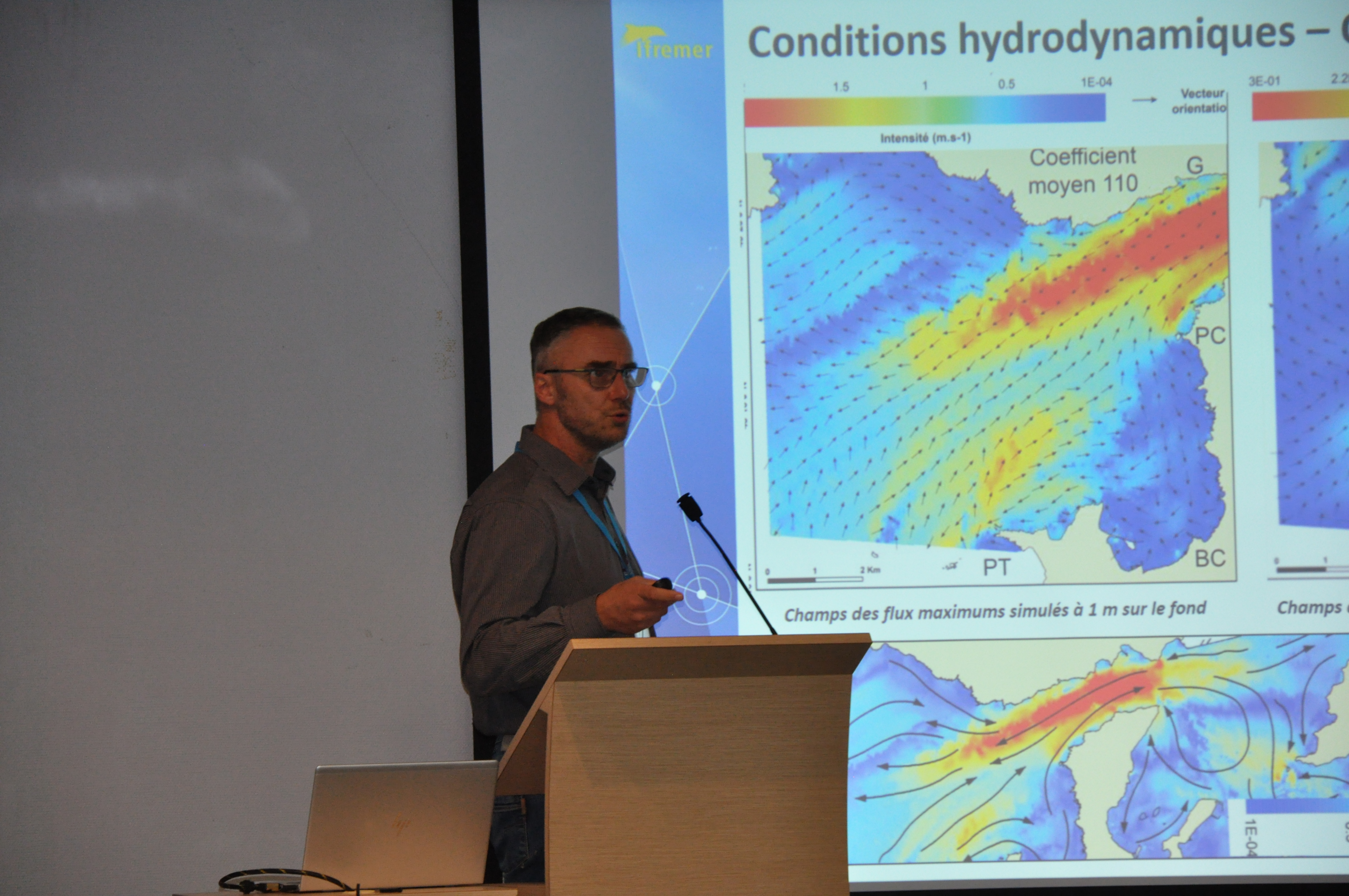
Zone de la Cordelière (morphologie, dynamique, sédimentologie)
La région située à la sortie du Goulet, entre Berthaume et la pointe du Toulinguet présente de nombreuses singularités courantologiques, morphologiques et sédimentaires. La chenalisation des courants tidaux en lien avec la présence des pointes rocheuses le long de la côte, et l'étroitesse du Goulet, n'explique qu'en partie la segmentation des dépôts et des formes sédimentaires observés. Il s'agit également d'un domaine largement ouvert aux grandes houles d'ouest, dont les plus extrêmes, pendant les tempêtes hivernales, sont capables de remobiliser les fonds à cette profondeur. La géomorphologie sous-marine à la verticale de la zone supposée du naufrage, montre la présence de l'ancien lit de la rivière de l'Aulne et de l'Elorn, réunifié à la sortie du Goulet, et qui s'écoulait pendant les périodes glaciaires vers le large, en direction de la rupture du plateau. Ce paléo-réseau fluviatile est occupé aujourd'hui par des sédiments sablo-coquilliers très mobiles, structurés en dunes sous-marines dont la cinématique reste à préciser.

Doctorant Forssea Robotics
Docking automatique entre deux robots marins : une approche par champs de vecteurs
De nos jours, les AUVs peuvent être utilisés pour accomplir de nombreuses missions sous-marines (détection de mines, levés bathymétriques ). Ils restent cependant limités par leur capacité de stockage interne et la durée de vie de leur batterie. Pour résoudre ce problème, l'entreprise Forssea Robotics développe un ROV autonome capable de s'amarrer sur un AUV pour le recharger et récupérer les données récoltées. Afin de permettre l'amarrage entre les deux robots, une approche par champs de vecteurs a été développée et testée en simulation et en mer sur un ASV. Elle atténue l'impact de l'ombilical du ROV sur sa trajectoire tout en anticipant les mouvements de l'AUV cible, permettant ainsi un amarrage dans de bonnes conditions.

Doctorant ECA Robotics
Planification d'une stratégie robuste de revisite d'un objet avec un robot sous-marin 'low cost' en se basant sur une carte
L'environnement sous-marin ne permet pas l'utilisation du positionnement absolu (GPS) et donc retrouver un objet identifié dans une carte construite par une mission au préalable n'est pas évident pour un robot type « low cost ». Une stratégie de revisite, en fonction des capteurs extéroceptifs embarqués, est proposée en passant par des points intermédiaires « amers » afin de garantir la revisite a priori de l'objet souhaité malgré les incertitudes de navigation.

Ingénieur de Recherche CNRS, Institut PPRIME, Poitiers
Le projet SEAHAND pour l'archéologie sous marine
Dans un contexte lié à l'archéologie sous-marine et à la protection des épaves situées en grande profondeur, le projet SEAHAND vise à développer un préhenseur robotique marinisé porté par un mini-véhicule sous-marin. L'implication des partenaires, spécialistes des mini sous-marins, de la télémanipulation, de la commande et des mains robotiques, mais aussi des archéologues sous-marins du DRASSM, doivent permettre une valorisation en situation réelle. Nous aborderons à travers cette présentation la démarche générale de développement, les choix technologiques effectués ainsi que les premiers résultats.

Kopadia
Intérêt des solutions multi-drones pour des applications industrielles, problématique du positionnement pour l'exploration grande profondeur

ENSTA
Boatbot : un zodiac autonome pour le recherche d'épaves
Boatbot est le zodiac autonome de l'ENSTA Bretagne. Il capable de tracter des capteurs comme un sonar ou un magnétomètre. Il a été conçu cette année et utilisé cet été dans le cadre de la recherche de la Cordelière. Pendant cet exposé, je montrerai les méthodes de régulation implémentées dans Boatbot et les pistes d'amélioration envisagées.

Kopadia
Archéologie sous-marine amateure, évolution et technologie
Présentation par la Société d'Archéologie et de Mémoire Maritime de ses recherches en cours et des méthodes adoptées. Réflexions sur les évolutions nécessaires pour réaliser de nouvelles découvertes dans l'espace côtier et au-delà des limites accessibles aux plongeurs.

ECA Robotics
A18D : AUV multi-senseurs pour l'exploration grand fond
A18D est un AUV (Autonomous Underwater Vehicle) du fabricant français de drone ECA Group. L'A18D est dédié à l'exploration grand fond et au relevé 3D précis des fonds marins. Il est capable de plonger jusqu'à 3000m de profondeur et assurer des missions de recherches d'épaves. Cet AUV emporte plusieurs capteurs acoustiques et vidéo mais garde un aspect compact pour une facilité d'intégration sur bateau d'opportunité. L'atout d'un tel AUV est de pouvoir proposer une haute résolution en imagerie et bathymétrique indépendante de la hauteur d'eau. La qualité de stabilité de ce drone permet notamment l'analyse précise d'épaves difficilement accessibles depuis la surface.

iXblue
CANOPUS, La solution de positionnement acoustique sous-marine globale
iXblue, concepteur et fabricant de centrales inertielles et dinstrumentation acoustique, combine ces deux technologies pour apporter la réponse la plus appropriée en termes de performances et de la facilité de déploiement à la problématique du positionnement sous-marin. Le nouveau système Canopus est un exemple doffre globalisée visant à répondre aux attentes dopérateurs aussi variés que les industriels de lOil&Gas ou les instituts scientifiques.

Oussama et Luc

Michel L'Hour

Olivia Hulot

Oussama Khatib présente Ocean 1

Jean Pierre Gazeau

Viorel Ciausu, Ifremer

Thierry Normant
Irène Mopin