|
|
|
|
|
|
|
|
|
Robex est une des équipes du Lab-STICC. Elle fait partie du pole IA&O (Intelligence Artificielle et Océan).
Tous les ans sont organisés les Robex days.
Pendant ces journées, il y a des exposés internes à Robex.
Comme tous les ans, cette rencontre se tiendra à l'ENSTA, site de Brest :


LLM : retours d’expérience en contexte académique
L’évolution rapide des modèles de langage (LLM) impose une réévaluation régulière des pratiques et des résultats. L’exposé examine leur place dans l’outillage de l’enseignant-chercheur au regard de la compétitivité scientifique et pédagogique. Des cas d’usage issus de premières expérimentations personnelles en précisent le périmètre d’utilité, les limites et les perspectives à court terme.

Cartographier la recherche : Utiliser ScimagoViz pour orienter ses publications
Choisir où publier est une étape essentielle mais souvent complexe pour un doctorant. Entre journaux et conférences, chaque option a ses spécificités en termes de visibilité, de rigueur scientifique et d’impact. Cette présentation propose un aperçu de l’outil ScimagoViz, des différences entre conférences et journaux en robotique, et des critères permettant d’identifier aussi bien les revues prestigieuses que celles, moins visibles, mais pertinentes pour diffuser ses travaux.

Mission Svalbard, retour d'expérience
Le projet GLACIGAS, financé par la Norvège, à pour objectif de mesurer les relargages de méthane et de voir l'influence de la marée
dans un fjord au sud de Longyearbyen. Dans ce contexte, les universités de Trondheim et de La Rochelle on fait appel aux robots de l'ENSTA (un USV et un ROV)
pour faire la bathymétrie du fjord, repérer les éventuelles poches de méthane, et si possible faire un prélèvement de gaz au fond de l'eau.
Cette présentation a pour but de faire un retour d'expérience sur le voyages, les tests effectués, quelques résultats obtenus, et les difficultés rencontrées.

Early vision for robotics
The talk will present bio-inspired navigation systems for robotics, particularly utilizing early vision, such as optic flow and low-resolution vision.

A la recherche de garanties de performance
Parvenir à garantir l'exécution d'une mission robotique est un objectif complexe pour lequel les outils ensemblistes jouent un rôle déterminant. Cependant, le devenir des solutions de l'automatique au travers du processus d'implémentation doit aussi être considéré. Cet exposé propose de présenter la méthodologie PANORAMA qui permet d'obtenir des schémas de régulation qui portent cette garantie.

Propulsion inertielle sous-marine
Lors de la conception de robots sous marins, l'utilisation d'actionneurs extérieurs (moteurs, servomoteurs, ballasts, etc) apporte un lot de contraintes (étanchéité dynamique, encombrement, usure, etc). Cet exposé présente une méthode de propulsion innovante sans aucun actionneur extérieur : la force est créée grâce à une palme souple excitée par la précession d'une roue d'inertie interne au robot.

Tenségrité hybride pour la manipulation coopérative d’objets : modèle et simulation
La manipulation d’objets lourds sous l’eau se fait le plus souvent depuis la surface, à l’aide de navires ou de barges, au prix d’une forte consommation de carburant et d’une précision limitée. Je propose ici une alternative : une flotte de petits robots organisés en tenségrité hybride : tenségrité mêlant réel et virtuel. Reliés entre eux et à l’objet par des câbles, les robots utilisent leurs propulseurs pour créer des tensions virtuelles qui maintiennent la précontrainte et rendent l’ensemble maniable et précis. La présentation se concentre sur le modèle mathématique et sa validation en simulation.

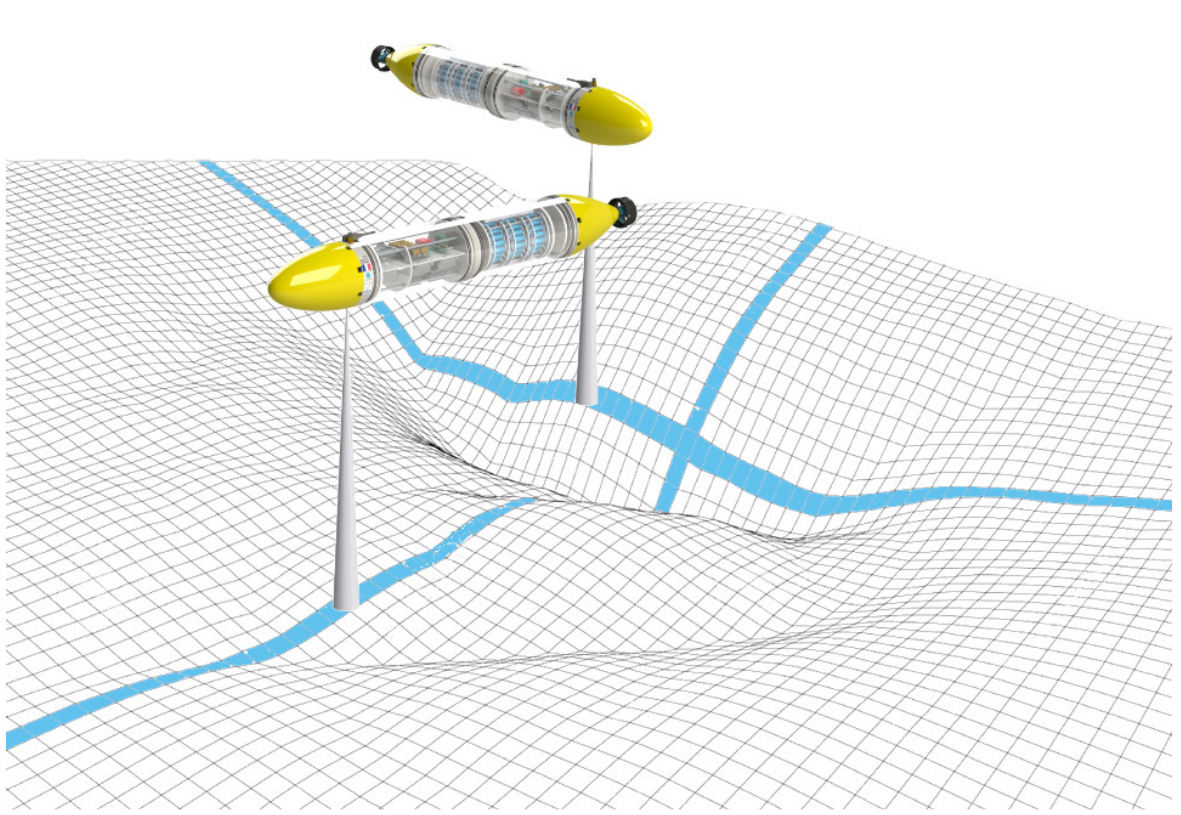
Modeling and Depth Control of a Subsurface Robot for Low-Cost Marine Robotics Experiments
We present a novel hybrid marine platform that bridges the gap between Autonomous Underwater Vehicles (AUVs) and Uncrewed Surface Vehicles (USVs). The vehicle is equipped with a GNSS mast that remains above the surface during low-speed navigation, enabling continuous GNSS localization while minimizing the influence of surface waves on the main body dynamics. At higher velocities, two fixed inclined wings generate sufficient hydrodynamic lift to drive the platform beneath the surface, allowing fully subsurface operation. This simple, low-cost and low-tech design makes the robot an attractive platform for swarm robotics demonstrations and student experimentation. In this talk, we introduce a dynamic model of the vehicle that captures the coupled surface–subsurface behavior and hydrodynamic effects of the inclined wings. Building on this model, we derive and validate a depth-control strategy capable of regulating the robot’s depth.
Site for Robex day 1:
![]()
Site for Robex day 2:
![]()
Site for Robex day 3:
![]()
Site for Robex day 4:
![]()
The other seminars of the Robex can be found here:
![]()
Le repas sera le mercredi soir 17 septembre au restaurant 'Clémenceau' à 20h.
![]()
