Voilier Autonome Instrumenté pour Mesures Océanographiques de Surface
(Autonomous sailing boat with embedded instrumentation for ocean surface measurements)
Olivier Ménage, Patrick Rousseau, Fabrice Le Bars, Luc Jaulin, etc.
Vaimos
Vaimos is an autonomous sailboat robot. Its goal is to collect measurements at the surface of the ocean.
ENSTA Bretagne (OSM) develops control algorithms and the software architecture.
IFREMER (LPO+RDT) builds the mechanics, the embedded instrumentation, the electronics, etc.
Convention ENSTA-IFREMER:
Control.
The robot follows a desired trajectory which is a sequence of lines. The robot has two modes.
(i) the direct mode: the distance between the
robot and its line corresponds to the GPS error (approx. 5 meters)
(ii) the tack mode: the distance to the line is
less than 100 meters.
Explanations of the controller during the conference IRSC, Cardiff.
Papers
Symposium Biarritz 2011, Vulnerability of coastal ecosystems to global
change and extreme events. 18 to 21 October 2011. Voilier
Autonome Instrumenté pour Mesures Océanographiques de Surface.
L. Jaulin, F. Le Bars , B. Clément, Y. Gallou, O. Ménage, O.
Reynet, J. Sliwka, B. Zerr (2012). Suivi de route pour un robot voilier, CIFA
2012, pp 695-702.
O. Ménage (2011). Rapport du projet de fin d'étude : VAIMOS, Ifremer, ENSTA-Bretagne.
T. Gorgues, O. Ménage, T. Terre, and F. Gaillard, An innovative approach of the surface layer sampling,
Journal des Sciences Halieutique et Aquatique, vol.4, pp.105-109, 2011.
L. Jaulin and F. Le Bars (2012). An interval approach for stability analysis; Application to sailboat robotics.
IEEE Transaction on Robotics,
Volume 27, Issue 5.
Poster (Portes ouvertes ENSTA-Bretagne).
L. Jaulin and F. Le Bars (2012). An interval approach for stability analysis; Application to sailboat robotics.
IEEE Transaction on Robotics,
Volume 27, Issue 5.
L. Jaulin and F. Le Bars (2012).
A simple controller for line following of sailboats,
In Proceedings of the 5th International Robotic Sailing Conference
(Springer Eds.), Cardiff, England.
F. Le Bars and L. Jaulin (2012).
An experimental validation of a robust controller with the VAIMOS autonomous sailboat,
In Proceedings of the 5th International Robotic Sailing Conference
(Springer Eds.), Cardiff, England.
Media
Revue de presse WRSC 2013Â :
TBO, TV report
Experiments
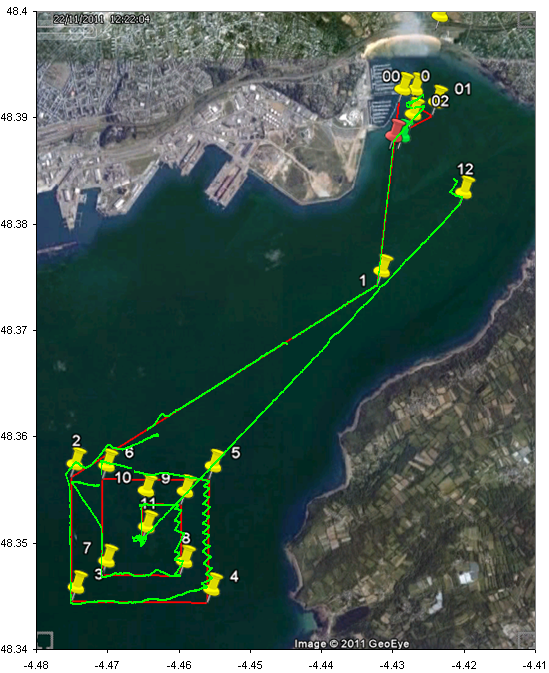
[1] Saint Anne (Tuesday, september 22, 2011).
Logfiles of the mission.
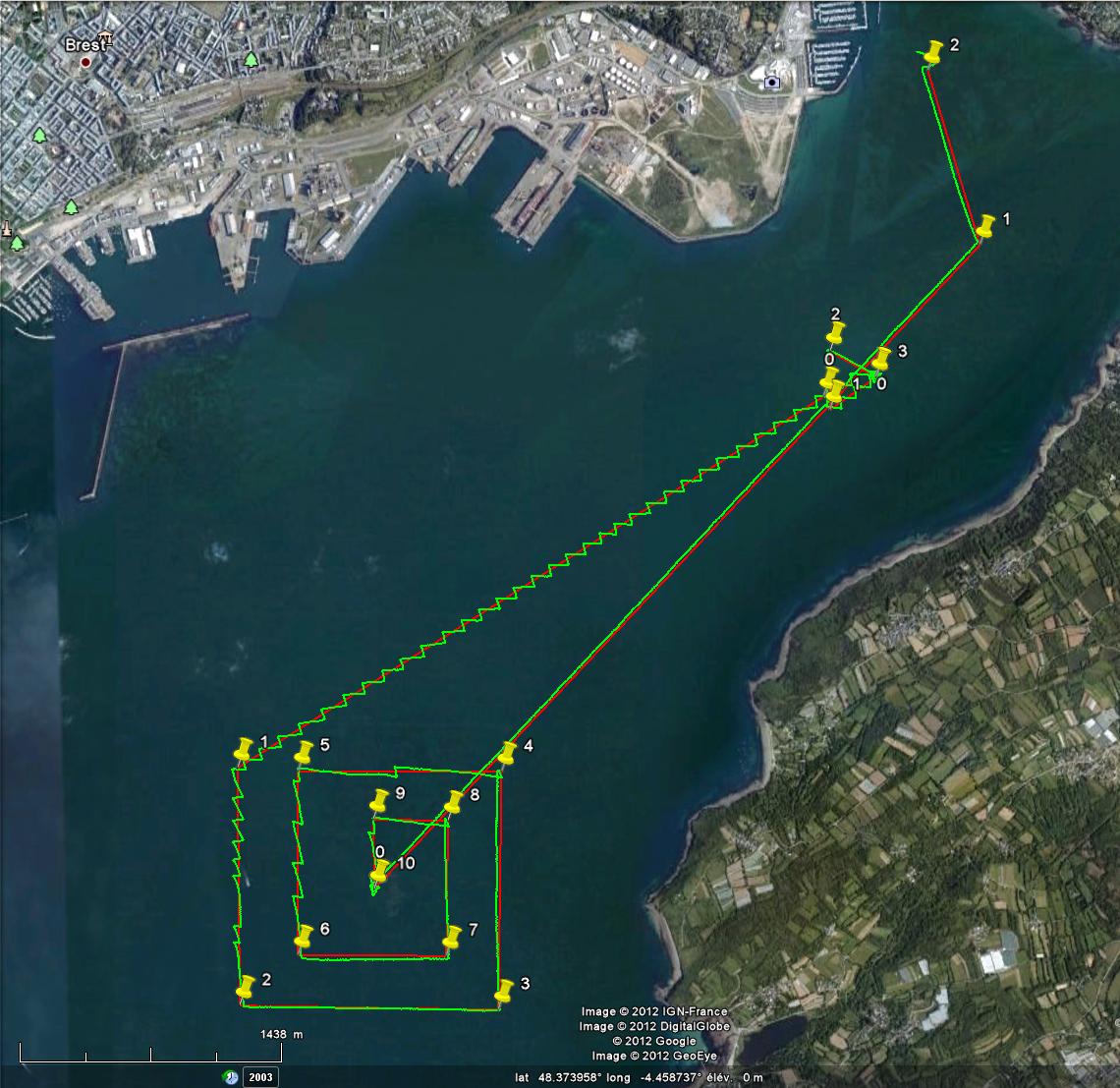
[2] Moulin Blanc (Tuesday, october 11, 2011).
Two identical missions were asked: one the morning and one the afternoon.
The red lines correspond to the desired
trajectory and the green curves correspond to the GPS tracks.