This microsite is associated to the paper
![]()
![]() L. Jaulin (2023).
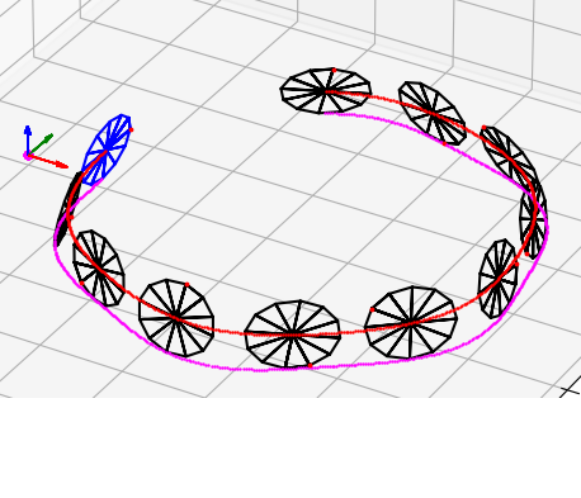
Modelisation of a rolling disk with Sympy
L. Jaulin (2023).
Modelisation of a rolling disk with Sympy
from sympy import *
def Symb_build():
t = symbols('t')
m,g,r= symbols('m g r')
c1,c2 = Function('c1')('t'),Function('c2')('t')
dc1,dc2 = Function('dc1')('t'),Function('dc2')('t')
ddc1,ddc2 = Function('ddc1')('t'),Function('ddc2')('t'),
ψ,θ,φ = Function('ψ')('t'),Function('θ')('t'),Function('φ')('t')
dψ,dθ,dφ = Function('dψ')('t'),Function('dθ')('t'),Function('dφ')('t')
ddψ,ddθ,ddφ = Function('ddψ')('t'),Function('ddθ')('t'),Function('ddφ')('t')
λ1,λ2 = Function('λ1')('t'),Function('λ2')('t')
def subsdiff(E):
E=E.subs({diff(dc1,t):ddc1,diff(dc2,t):ddc2, diff(dφ,t):ddφ, diff(dθ,t):ddθ, diff(dψ,t):ddψ})
E=E.subs({diff(c1,t):dc1, diff(c2,t):dc2, diff(φ,t):dφ, diff(θ,t):dθ, diff(ψ,t):dψ})
return simplify(E)
def Reuler(φ,θ,ψ):
Rφ = Matrix([ [1,0,0],[0,cos(φ),-sin(φ)],[0,sin(φ),cos(φ)]])
Rθ = Matrix([ [cos(θ),0,sin(θ)],[0,1,0],[-sin(θ),0,cos(θ)]])
Rψ = Matrix([ [cos(ψ),-sin(ψ),0],[sin(ψ),cos(ψ),0],[0,0,1]])
return Rψ*Rθ*Rφ
def wr(R):
W=Transpose(R)*diff(R,t)
return Matrix([[-W[1,2]],[W[0,2]],[-W[0,1]]])
def Lagrangian(q,dq):
c1,c2,φ,θ,ψ=list(q)
c=Matrix([[c1],[c2],[r*cos(θ)]])
dc=diff(c,t)
R=Reuler(φ,θ,ψ)
Ep=m*g*c[2]
I=Matrix([[1/2*m*r**2,0,0],[0,1/4*m*r**2,0],[0,0,1/4*m*r**2]])
Ek=1/2*m*(dc.dot(dc))+(1/2)*wr(R).dot(I*wr(R))
L=subsdiff(Ek-Ep)
return Matrix([L])
q=Matrix([c1,c2,φ,θ,ψ])
dq=Matrix([dc1,dc2,dφ,dθ,dψ])
ddq=Matrix([ddc1,ddc2,ddφ,ddθ,ddψ])
L=Lagrangian(q,dq)
Q=subsdiff(diff(L.jacobian(dq),t)-L.jacobian(q))
A=Matrix([[1,0,-r*sin(ψ),-r*cos(ψ)*cos(θ),r*sin(ψ)*sin(θ)],
[0,1, r*cos(ψ),-r*sin(ψ)*cos(θ),-r*cos(ψ)*sin(θ)]])
τ=λ1*A[0,:]+λ2*A[1,:]
a=A*dq
da=diff(a,t)
da=subsdiff(da)
da=simplify(da)
S=Matrix([da,*list(Q-τ)])
M=S.jacobian([λ1,λ2,ddq])
b=M*Matrix([λ1,λ2,ddq])-S
λ1,λ2,ddc1,ddc2,ddφ,ddθ,ddψ=list((M.inv()*b))
ddφ=simplify(ddφ)
ddθ=simplify(ddθ)
ddψ=simplify(ddψ)
return lambdify((c1,c2,φ,θ,ψ,dφ,dθ,dψ,m,g,r),(dc1-a[0],dc2-a[1],dφ,dθ,dψ,ddφ,ddθ,ddψ))
symb=Symb_build()
from roblib import *
def f(x):
c1,c2,φ,θ,ψ,dφ,dθ,dψ=list(x.flatten())
dx=symb(c1,c2,φ,θ,ψ,dφ,dθ,dψ,m,g,r)
return array([[dx[0]],[dx[1]],[dx[2]],[dx[3]],[dx[4]],[dx[5]],[dx[6]],[dx[7]]])
def draw_wheel3D(ax,x,y,z,φ,θ,ψ,r=1,col='blue',size=1):
M=tran3H(x,y,z)@eulerH(φ,θ,ψ)@wheel3H(r)
draw3H(ax,M,col,False,1)
def draw(ax,x,r,col):
c1,c2,φ,θ,ψ=x[0,0],x[1,0],x[2,0],x[3,0],x[4,0]
c3=r*cos(θ)
draw_wheel3D(ax,c1,c2,c3,φ,θ,ψ,r,col)
draw_axis3D(ax,0,0,0,eye(3,3))
def SimuRollingDisk(x):
ax = Axes3D(figure())
dt = 0.02
draw(ax,x,r,"blue")
for t in arange(0,10,dt):
x=x+dt*(0.25*f(x)+0.75*(f(x+(2/3)*dt*f(x))))
pause(0.01)
clean3D(ax,-2,14,-8,8,0,16)
draw(ax,x,r,"black")
c1,c2,φ,θ,ψ=x[0,0],x[1,0],x[2,0],x[3,0],x[4,0]
m,g,r = 5,9.81,1
c1,c2,φ,θ,ψ,dφ,dθ,dψ= 2,0, 0,0.1,0,2.5,0,0
x=array([[c1],[c2],[φ],[θ],[ψ],[dφ],[dθ],[dψ]])
SimuRollingDisk(x)