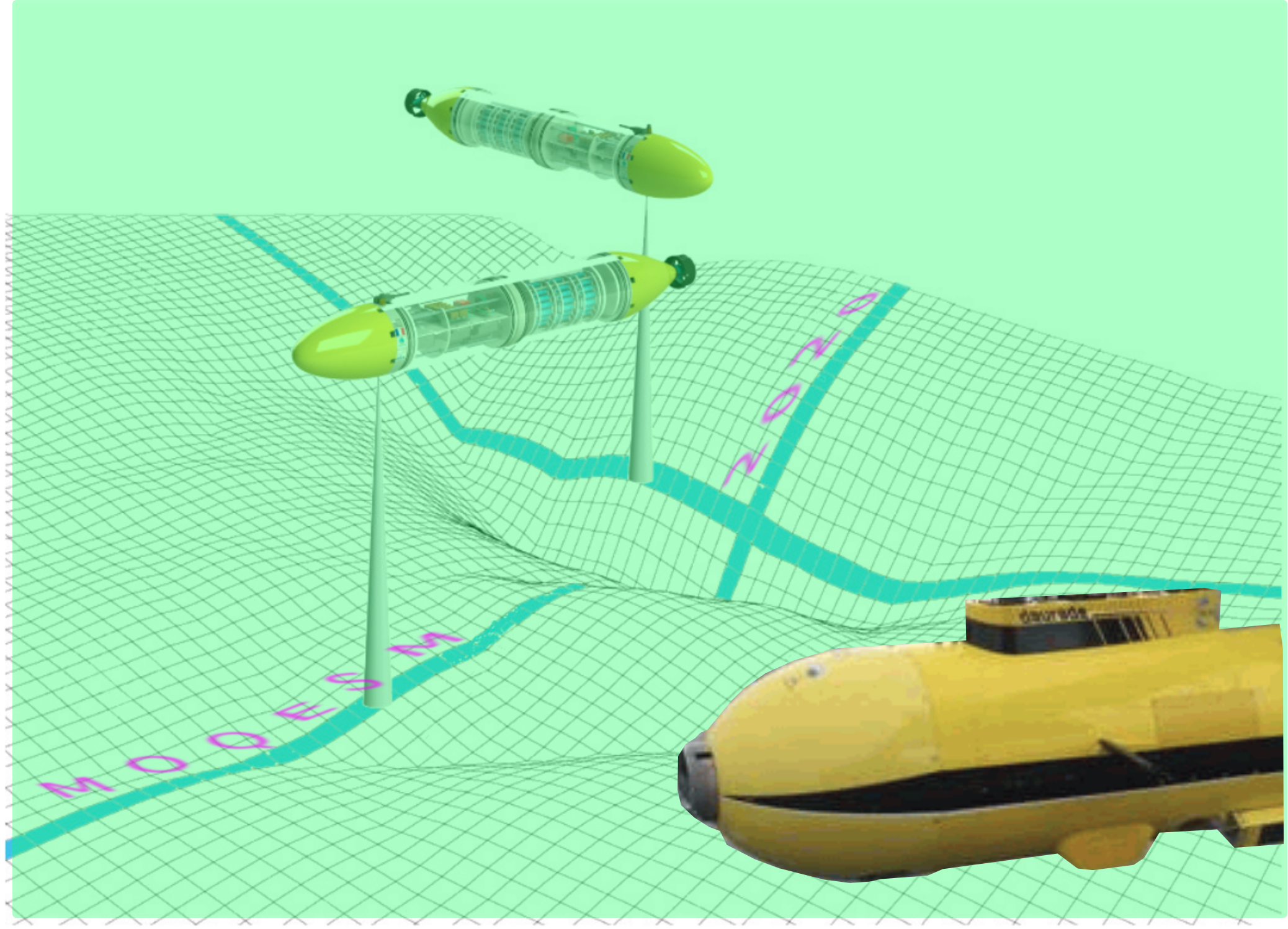
MOQESM'2020
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Due to the crisis of Covid'19, the workshop was both in virtual and face-to-face at ENSTA-Bretagne, Brest, Room F231.
All videos are available in this site.
MOQESM
(Monitoring Quantitatif de l’Environnement Sous-Marin Quantitative Monitoring of Underwater Environment)
est one of the workshops of Sea Tech Week.
MOQESM will be held in Brest, virtually and in person (at ENSTA-Bretagne), on 13 and 15 October 2020, Room F231.
![]()
MOQESM'2018 :
![]()
MOQESM'2016 :
![]()
MOQESM'2014 :
![]()
ICOURS'2012 :
![]()
Motivations :
The theme is robotics for marine observation.
It is perfectly in line with the main theme of
Sea Tech Week 2020
'Observation - from the bottom of the ocean to space'.
In recent decades, mobile robotics has developed largely in structured and already mapped environments.
In unknown and unstructured environments, submerged caves, the seabed, robotics changes its nature.
Not only is it becoming indispensable because humans can hardly intervene safely, but often the operator
can no longer help during remote operation by robots. Robots must therefore have maximum autonomy and intelligence
in order to accomplish a mission. This is called exploratory robotics because the robot must map its environment,
make decisions, locate itself and be able to return.
MOQESM is thus interested in the various advances in robotics for marine and underwater observation.
We will discuss new techniques for underwater localization, new types of marine robots, innovative methods for data transmission,
the latest sensors for exploration, software for data exploitation, etc.
Organization :
Sea Tech Week is a conference composed of sessions and a trade show.
MOQESM can be seen as a grouping of sessions around marine robotics.
The Sea Tech Week will be organized from October 12 to 16, mainly in virtual, but also with a part in face-to-face, at least for MOQESM.
MOQESM is composed of several 2-hour sessions called 'papers'.
These sessions are in parallel with other sessions.
Once selected, the abstracts are presented in these paper sessions.
Those who are not selected for a presentation may be accepted for a poster.
The Scientific Committee of MOQESM may refuse an abstract.
The call for abstract submissions has a deadline of July 31.
Registration :
Registration is done on the Sea Tech-Week website, but abstracts should also be sent by email to
lucjaulin@gmail.com, annick.billon-coat@ensta-bretagne.fr
in order to be reviewed by the scientific committee.
Companies present at MOQESM : Kopadia, Thales, Forssea, RT-sys, iXblue, ECA-robotics, Subsea-Tech, Orange-Labs, Pilgrim, Texys Marine, Oxxius.
Institutions : DGA, DRASSM, Ifremer, EDF, Région Bretagne, Shom
Laboratories : LIRMM, IRISA, LS2N, ISIR, COSMER, I3S.
Research groups (GDR of the CNRS) that support us : GDR Macs et GDR robotics
ns The invited speakers are Professor Karl Sammut, University of Finders (Australia) and professor Rafael Garcia, University of Girona (Spain) .

Karl Sammut obtained his PhD from The University of Nottingham (U.K) in 1992. He commenced his appointment at Flinders University in 1995 and is currently a Professor with the Engineering Discipline in the College of Science and Engineering at Flinders University. He serves as the Director of the Centre for Maritime Engineering at Flinders University and the Theme Leader for the Maritime Autonomy Group. He also holds a part time role with the Defence Science and Technology Group (Australia). His areas of research specialization are concerned with navigation, optimal guidance and control systems, and mission planning systems for autonomous marine surface and underwater vehicles.

Dr. Rafael Garcia is Professor (Catedrático de Universidad) at the Computer Architecture dept, University of Girona (Spain). He is the founder and director of the Underwater Vision Lab (UVL), which belongs to the Computer Vision and Robotics Group. His main research interests are underwater robotics and computer vision. Dr. Garcia is particularly interested in how to make unmanned underwater vehicles sense their environment to carry out autonomous surveys of the ocean floor. From March 2010 to June 2015 he served as the director of the Computer Vision and Robotics Group of UdG. He serves as consultant to industry in the field of artificial vision and manufacturing, and he founded the spin-off company Coronis Computing SL, a company that commercialises Computer Vision and Machine Learning solutions.
13h30 Offline
![]()
Karl Sammut, University of Flinders (Australia)
Maritime Autonomy: Autonomous Launch and Recovery
14h00. Online with zoom
![]()
João Borges de Sousa, LSTS - Porto University
António Pascoal/Instituto Superior Técnico, Lisbon
EUMarine Robots, a Marine robotics research infrastructure network: Mid-term
14h30 Offline
![]()
Julien DAMERS, France, KOPADIA
AUV navigation using isobath
15h00. In real, Room F231
![]()
Stéphane Imbert, France, IMT-A
AIS Relay for Autonomous Underwater Vehicle using an Adaptive Bit Rate Multi-Carrier Spread Spectrum Modem
15h30 Offline
![]()
Dorothée JAMES, France, EPHE /univ Paris
Coupling UAV multispectral imagery and neural network to model the seagrass coastal protection service
16h00. Online with zoom .
![]()
Quentin Delplanque, France, ELWAVE Nantes
6th Sense for Underwater Vehicle
16h30. In real, Room F231
![]()
Henrique Fagundes Gasparoto, France, ENIB, ENSTA-Bretagne
Modelling, Optimisation, and Design of a New Reconfigurable Magnetic Coupling Thruster for Underwater Robots
17h00 Online with zoom .
![]()
Guillaume Labbé-Morissette, Canada, Cidco Rimouski
Unsupervised detection of underwater objects in sidescan sonar imagery
17h30 Offline
![]()
Franck Florin, France, Thales, Brest
High Frequency Acoustic Channel Modeling and Experiment in Shallow Waters
13h30. Offline
![]()
Rafael Garcia, Computer Vision and Robotics Institute (VICOROB)
Challenges of vision-based robotic ocean exploration
14h00. Offline
![]()
Delphine Mallet, Nouvelle-Calédonie VISIOON
Non-destructive monitoring of soft-bottom fishes and habitats using a standardized
remote un-baited 360° video sampling method
14h30. Offline
![]()
Markus Lindh, Suède, Swedish Meteorological and Hydrological Institute, Gothenburg
A picture is worth a thousand data points: Making videos and images from marine environmental monitoring available to all
15h00.
Online with zoom
![]()
Pierre-Yves Morvan, France, iXBlue, Brest
Delph Subsea Positioning Software - iXblue’s innovative software solutions for subsea positioning
15h30.
In real, Room F231
![]()
![]()
Luc Jaulin, Lab-STICC, ENSTA Bretagne
Ocean exploration with underwater robots
16h00.
In real, Room F231
![]()
Simon Rohou, France, Lab-STICC, ENSTA Bretagne
Underwater Localization with Indistinguishable Landmarks
16h30.
In real, Room F231
![]()
Joris Tillet, France, Lab-STICC, ENSTA Bretagne
Guaranteed underwater localization with scanning sonar
17h00. Offline
![]()
Nathalie Olivier, France, iXBlue Brest
Test results before the deployment of a subsea geodetic monitoring system
17h30. Offline
![]()
Pierre-Jean Bouvet, France, ISEN, IROMI-LMAIR
An innovative network of instrumental platforms for marine and underwater technologies
18h00. Offline
![]()
Ornella Tortorici, University of Toulon, COSMER-IM2NP
Using Vortex Simulator to validate the control of a tethered ROV

Enseignant-chercheur, ENSTA-Bretagne
Il travaille principalement sur le calcul par intervalles de trajectoire.
Enseignant-chercheur, ISIR, Paris
Il travaille principalement sur la commande des robots voiliers.

Enseignant-chercheur en robotique sous-marine au LIRMM (CNRS/Univ. Montpellier)
Il travaille sur la perception et la commande, appliquées aux robots sous-marins dans le domaine de l'archéologie et de la biologie

Professeur en robotique
Professeur in ocean robotics. He works on interval computation with applications to autonomous underwater navigation.

Secrétaire de laboratoire
Elle organise MOQESM pour la quatrième fois. Elle organise de nombreuses conférences qui se tiennent à Brest comme SWIM, ICOURS, etc.

Doctorant
With : Christophe Laot, Abdel-Ouahab Boudraa, Jean-Jacques Szkolnik
Affiliation: IMT Atlantique et Ecole Navale
AIS Relay for Autonomous Underwater Vehicle using an Adaptive Bit Rate Multi-Carrier Spread Spectrum Modem
Autonomous Underwater Vehicles (AUV) are commonly used in research and military sea applications.
Therefore, AUVs are becoming part of the ocean navigation systems.
To calibrate their navigational system by GPS, AUVs must regularly surfaced,
operation during which collisions with vessels can occur.
For security purpose, communicating the locations of boats to AUVs is required.
In this presentation, a communication system is developed to gather vessels positions
using the AIS system and relay this information to AUVs. By having a buoy or a boat at the surface,
it is possible to collect data about the surrounding ships and forward these data to the AUV fleet.
Since the bit rate of underwater communication is way lower than the AIS one especially at large distances,
reducing the payload for relay purpose is required. By removing irrelevant AIS data and
compressing positional ones, the AIS payload can be reduced saving 182 bits on each 256 bits message.
The proposed communication system is a multi-carrier spread spectrum (MC-SS) downlink modem
broadcasting the positions of vessels towards the AUVs fleet. MC-SS combines spreading and multi-carrier signal.
Using variable length spreading sequences and OFDM, this communication system creates
a flexible and robust solution thanks to the frequency diversity and processing gain to transmit at various distances.
The modem was experimented with the Watermark channel simulator considered as a realistic test
benchmark for underwater communications. Results show the effectiveness of the spreading factor to
improve the error rate at low SNR.
Roboticien
Ocean exploration with underwater robots
Man carries out many long and perilous missions in the ocean, such as the transport of goods, the construction of offshore infrastructures, the search for wrecks, etc. Because of the difficulty, cost and dangerousness of these missions, marine robots are increasingly used. Nowadays, they are mainly used for taking measurements, constructing underwater maps, searching for mines or studying marine currents. In order to avoid collisions with surface traffic, robots are generally asked to stay underwater and never to resurface. Localization becomes difficult and often even impossible due to the absence of landmarks and the non-functioning of GNSS. By mimicking the techniques of ancient navigators, or marine animals (such as sea turtles), we will show that a submarine robot can explore a very vast environment and return to its initial position without being able to geolocalize itself.
Roboticien
Underwater Localization with Indistinguishable Landmarks
A realistic situation encountered in underwater robotics is the one of a robot evolving in an environment made
of indistinguishable landmarks. The rocks that can be observed on the seafloor represent strong positioning
data if we provide the robot with a prior map of the environment.
The difficulty however is to identify the landmarks in the map, which cannot be done only by image processing.
Indeed, the observations of rocks are view-point dependent and the sonar images are noisy,
which makes it difficult to distinguish one rock from another only from image processing.
Furthermore, the position of the robot may be lost during a diving phase, which obliges us
to consider unknown initial position.
We propose a constraint propagation approach to solve simultaneously the problems
of identifying the rocks and estimating the position of the robot.
The efficiency of the method is shown on an actual experiment involving an autonomous underwater
robot and data from a side scan sonar.

ELWAVE (Nantes, France)
6th Sense for Underwater Vehicle
Nowadays, real-time 360° “all-around” perception is a non-achieved key capability for safe and
efficient operations of underwater remote (ROV) or autonomous underwater vehicles (AUV).
The navigation in low or non-visibility, the obstacle avoidance in cluttered field, the close approach
of infrastructure, the tracking of buried object are very complex and challenging tasks that an innovative
sensor may simply overcome.
ELWAVE, a company located in Nantes, France, is the first and unique company to develop and commercialize
revolutionary real-time 360° subsea sensors based on ‘active electrolocation'.
ELWAVE valorizes more than 10 years of research works from the biorobotics laboratory of Atlantic
Mines-Telecom Institute (Nantes, France).
‘Active electrolocation' is the sensory mode used by some fishes able to generate electric field and
living in tropical muddy and congested waters. Inspired from this unique biomimetic technology,
ELWAVE's sensors mounted on underwater vehicles generate a weak electromagnetic field and measure its modulations.
Algorithmics and artificial intelligence processing then enable the detection, the location and the
characterization (size, shape, type of material) of the objects.
ELWAVE technology is efficient in simple and any degraded operating situations, allows the detection in
water and into sediments of metallic and non-metallic objects and living organisms.
This capability developed by ELWAVE is a major breakthrough for underwater robotics
adding a « 6th Sense » to underwater vehicles.

Doctorant en robotique, ENSTA-LabSTICC
Guaranteed underwater localization with scanning sonar
To localize a robot in a well known environment containing walls, like pools or harbors,
seems to be relatively easy with a scanning sonar.
However, most of the time, the data given by the sonar contains several echoes corresponding to the walls as expected,
but also to the surface or the ground, to multi echoes and other perturbations. So the convergence, the precision,
and the reliability of the localization highly depend on which information is used from sonar data.
The method proposed here consists in using only reliable information deduced from sonar data in the
form of constraints.
The area of possible localization for the robot is then contracted in order to always fit with the desired constraints.
With this method, we can guarantee that, provided that some realistic assumptions are fulfilled, the robot is
never outside the computed area.

Localisation, iXblue, Brest
Delph Subsea Positioning Software - iXblue's innovative software solutions for subsea positioning
Improving operational efficiency is a recurring challenge for subsea operations.
Throughout the life of a field, from construction up to decommissioning, several subsea vehicles
will be deployed to cover various tasks such as pipeline and structure installation, maintenance or repair.
An ROV or AUV assigned to a specific task will require multiple positioning sensors (LBL, USBL, INS…)
to complete its mission. Defining the “good enough” subsea positioning strategy, i.e. to ensure a
minimum accuracy without compromise on safety, can be a complex exercise.
For instance, an overestimation of the LBL transponders required will directly induce vessel time and
finally costly operations. On the other hand, a certain level of positioning redundancy may be requested
for a vehicle operating close to a subsea asset in production.
To ease the design and monitoring of a subsea vehicle navigation, iXblue has developed an integrated solution.
Not only has the company broadened its product range with the new intelligent Canopus LBL Transponder
and the new generation Ramses transceiver, but with Delph Subsea Positioning Software,
iXblue now provides a complete integrated solution for subsea positioning that goes a step further by bringing
significant efficiency. Divided in 4 modules (LBL Array Planning, Navigation Simulation, Operations, DelphINS)
with an intuitive user interface, Delph Subsea Positioning (DSP) is an integrated software suite for the preparation,
the operation and the post-processing of iXblue positioning devices (USBL, LBL and INS).

Assistant professor
With: Daniel Alcaraz, Gianluca Antonelli, João Borges de Sousa, Massimo Caccia, Gerard Dooly, Niamh Flavin, Achim Kopf, Martin Ludvigsen, Jan Opderbecke, António Pascoal, Matthew Palmer, Roberto Petroccia, Pere Ridao, Antonio Vasilijević, Sen Wang
Affiliation: LSTS - Porto University (Porto, Portugal)
EUMarine Robots, a Marine robotics research infrastructure network: Mid-term report
The H2020 Marine robotics research infrastructure network (EUMR) mobilizes a comprehensive consortium of key
European institutions involved in the area of marine robotics to open up key facilities to researchers worldwide
by fostering joint R&D and providing end-users access to an integrated world-class marine robotics infrastructure (RI).
This paper reports on the three types of activities carried out in EUMR: Transnational Access (TNA),
Joint Research (JRA) and Networking Activities (NA).
TNA offers access to infrastructures of the 15 project partners. These include a variety of autonomous underwater,
surface and air vehicles, ships and testbeds. Access is granted through competitive calls.
The first two calls in October 2018 and August 2019 elicited a total of 57 eligible applications from
Europe, Asia, and North America, with 50 projects being approved.
JRA focuses on developing advanced marine robotic systems and technologies and improving existing infrastructures.
This involves 6 tasks:
i) Advanced vision, acoustic, and manipulation systems for automated inspection and intervention operations,
ii) Cooperative navigation and control of networked vehicles for increased autonomy at sea,
iii) Hybrid acoustic-optical underwater communication networks for next-generation cooperative systems,
iv) Advanced Systems for Under-Ice operations,
v) Enhanced underwater LARS system and
vi) Cooperative human-marine robot systems.
NA included the organization of the 2018 and 2019 editions of the Breaking the Surface workshop,
the PLOCAN glider school and the EMRA annual conference.

Directrice-fondatrice chez VISIOON
With : Marion Olivry, Sophia Ighiouer, Laurent Wantiez
Affiliation: VISIOON – 2 rue Marcel Creugnet 98800 Noumea, New Caledonia.
Non-destructive monitoring of soft-bottom fishes and habitats using a standardized remote un-baited 360° video sampling method.
Soft-bottoms habitats are used as a nursery, a feeding ground or a transit area by fish. However, these fish assemblages are poorly known because of the lack of a standardized and non-destructive sampling method. We developed a remote un-baited 360° video sampling method to monitor the diversity, abundance and structure of soft-bottom fish and their habitat. The technique uses a low-cost high definition camera enclosed in a waterproof housing, fixed on a tripod and set on the bottom from a boat. To assess the efficiency of this method, 534 videos were recorded in the Southwest Lagoon of New Caledonia (60 km²). The technique can sample bare, vegetated or mixed soft-bottoms. 172 fish species (37 families) were recorded. Turtles, dolphin, sea snakes were also observed. The results are consistent with the known characteristics of the lagoon soft-bottom of New Caledonia. The method is efficient to identify the different habitats and the structure of fish assemblages. We provide general recommendations to use this method and abacus giving the proportion of the theoretical total specific richness sampled according to the number of stations or the duration of the recording.

Marine biologist
With: Johan Stål
Affiliation: Swedish Meteorological and Hydrological Institute (Gothenburg, Sweden)
A picture is worth a thousand data points: Making videos and images from marine environmental monitoring available to all
A picture is worth a thousand words” is a common proverb to describe the advantage of using a picture over words in advertisement. In marine environmental monitoring, video and images are often the foundation of data, where one video or image can be worth thousands of data points. Yet, there is a fundamental gap between data sampling and data access where video and image data from the marine environmental monitoring community needs to be made publicly accessible with good metadata descriptions. SMHI have developed a state-of-the-art system for archiving and publishing image and video data from marine environmental monitoring. Here, we will present our solution for a system that is capable of receiving, archiving, quality controlling and packaging data. Video and image data collected at SMHI include monitoring of epibenthos, phytoplankton and megafauna (seals and harbour porpoise). We are using a metadata description applied from the INSPIRE directive and include the use of digital object identifiers (DOI) for published data packages so that data is findable. All data, including metadata, goes through a high-throughput quality control and administration system developed in-house at SMHI with open source code (MIT license). The data will also be made available to ongoing international projects such as JERICO-RI and for data aggregators such as EMODnet, SeaDataCloud and ICES. We anticipate that the data will be used by the regional sea conventions and potentially also the European Environmental Agency

Engineer
With: François Effa et Damien Goaper
Affiliation: THALES (Brest, France)
High Frequency Acoustic Channel Modeling and Experiment in Shallow Waters
Acoustic communication is essential for Autonomous Underwater Vehicles (AUV) in order to exchange data
with the sea surface for command and control. Communicating with an AUV in shallow water may however
be challenging because of the channel distortion introduced by sound propagation.
Underwater acoustic channel models provide a tool for predicting the performance of communication systems,
and are essential for system simulation. In this paper, we describe a channel
model of the 10-50 kHz frequency band which incorporates physical laws of acoustic propagation (attenuation,
absorption, bottom/surface reflections), as well as the effects of random local variations
(diffusion and reverberation).
The model is validated using real data obtained from an experiment in North-Atlantic shallow waters.
The experiment is based on the LMAIR (Laboratoire Marin d’Acoustique et d’Imagerie de la Rade) equipment.
This equipment was supported by the European Union regional development funds and financial contributions
of Région Bretagne, Département du Finistère, and Brest Métropole, under Grant Contrat de Plan Etat Région (CPER) IROMI.
We introduce the sound propagation model in shallow waters and we describe the experimental equipment.
Then the presentation details the methods used to measure the parameters of the model.
The experimental results are addressed with a focus on the limitations.

Ingénieure d'étude
With: Antoine Collin, Thomas Houet, Nolwenn Le Poulain
Affiliation: EPHE, PSL Université Paris, LETG (Dinard, France)
Coupling UAV multispectral imagery and neural network to model the seagrass coastal protection service
Seagrasses are sensitive to global changes. Lying on subtidal and intertidal areas,
seagrasses provide ecosystem services as a support for biodiversity, recreation or coastal protection.
Highlighted at the international scale by Intergovernmental Oceanographic Commission and International
Platform on Biodiversity and Ecosystem Services and also by national institution,
the study and monitoring of these specific ecosystems is crucial in the current global changes.
Seagrass habitat mapping is carried out using active SoNAR, LiDAR technology, or passive satellite imagery.
The low temporal resolution of these remote sensing methods can be overcome, today, by low-cost
unmanned aerial vehicle (UAV), provided with ultra high spatial but also very high temporal resolution
(UHSR and UHTR, respectively).
The aim of this study is to propose an innovative methodology to model the ecosystem protection
service induced by seagrasses, in 2D, and with UHSR, by coupling the UAV multispectral (MS) imagery,
its by-products, and neural network (NN) learner. This consists of a 4-step method:
1) in situ wave measurement through pressure sensors recording at UHSR and UHTR,
and calculation of wave attenuation values between measurement stations,
2) UAV MS imagery acquisition at UHSR,
3) quantification of the UAV predictors’ (MS imagery data and by-products) contribution to the observed
wave attenuations, and
4) spatially-explicit modeling using an artificial NN. The best 4 predictors from the MS imagery are used
for the final modeling of the protection service offered by seagrasses.

Doctorant, Kopadia
With : Corentin Jegat
Affiliation: Kopadia S.A.S, Lab-STICC, France
AUV navigation using isobath
This presentation is about AUV navigation using isobath. Several techniques have been developed to address the problem of localisation and navigation underwater with the emergence of Autonomous Underwater Vehicle (AUV) technology. Some use state-of-the-art thus costly Inertial Navigation System (INS) and Doppler Velocity Log (DVL) to limit drifting errors. Others utilize an embedded bathymetry map and sonars to perform Terrain Relative Navigation (TRN) algorithms to correct drifting errors. Alternating Landmark Navigation (ALN) has been investigated to remove the need of an embedded map for navigation but requires several AUVs to be used. At Kopadia we performed AUV navigation using isobath. An isobath is a set of connected points which all have the same depth below the water surface, may it be ocean, sea or lake. It is easily measurable with low-cost sensors such as a simple depth sensor, an echo-sounder and an INS to control the attitude of the vehicle. This allows the design of a low-cost AUV which is suitable for the case of a swarm of identical AUVs. We also present future work to perform localization using isobath and adapt this navigation method for a swarm of AUVs aiming at exploring a wide area.

Researcher
Affiliation: CIDCO, Rimouski, Canada
Unsupervised detection of underwater objects in sidescan sonar imagery
The problem of finding underwater objects is a recurring issue in many fields, such as hydrography, search and rescue (SAR), underwater archaeology, marine sciences, and many more. Unfortunately, the hostile nature of the underwater environment for human beings, the weak penetration of light and the difficulty of acquiring high-quality images, along with the high mobilizing costs of SCUBA or remotely-operated solutions only makes this endeavour harder to fulfill. The shift towards autonomous vehicles equipped with acoustic imaging technology as force multipliers during such operations brings along new problems with the multiplication of data sources, such as an exponential increase in required resources for post-processing the data. Thus, this presentation details a new method to recognize and detect underwater objects in real-time sidescan sonar data imagery streams, with case-studies of applications for underwater archeology, and ghost fishing gear retrieval.

Engineer
Affiliation: iXblue, Saint-Germain-en-Laye, France
Test results before the deployment of a subsea geodetic monitoring system
Geodetic networks at sea are necessary to monitor active faults and the long term displacement of tectonic plates. iXblue has developed a new integrated subsea monitoring system: Canopus The Canopus transponders are enable to regularly measure precisely the distance between the transponders that are in acoustic line of sight. The measurement are stored in a memory inside each beacon and can be collected from surface using acoustic modem. In collaboration with the IUEM, and in the framework of ERC Focus project, 8 Canopus beacons are going to be deployed at each side of the North Alfeo Fault in Sicilia for a 4 years monitoring program. To prepare the deployment, a first experiment took place in Brest Bay in July 2019. Thanks to Delph subsea positioning software, simulations enable to confirm acoustic line of sight between beacons considering the local bathymetry, the sound velocity profile and the height of the transponders above the seabed.

Lecturer
Affiliation: ISEN Yncréa Ouest, Brest, France
With : Philippe Forjonel, Yves Auffret
IROMI-LMAIR : an innovative network of instrumented platforms for marine and underwater technologies
The “Laboratoire Marin d’Acoustique et d’Imagerie de la Rade (LMAIR)”, in English “Maritime laboratory for acoustics and
imaging of the roadstead of Brest” is an innovative research infrastructure, leaded by ISEN Brest Yncréa Ouest and funded
within the frame of the state-region plan (CPER) called “Infrastructure de Recherche pour Observatoires Marins Innovants (IROMI)
by the European Regional Development Fund (ERDF), the Brittany region, the Finistere department and Brest city.
The LMAIR infrastructure consist of 3 relocatable marine platforms and a fixed pontoon situated in the roadstead of Brest
within the Sea Test Base – Celadon premises, a non-profit organization that provides Land based and marine facilities for
ocean science and technology. Produced by RTSYS company according to ISEN Yncréa Ouest specifications, each platform is
energy self-sufficient owing to wind turbine and solar panels and is connected to the ISEN Yncréa Ouest labs (or other location)
by using a 4G radio link through a Virtual Private Network (VPN) tunnel. The instrumentation includes an acoustic gondola with
5 hydrophones (including 1 wideband sensor) and one acoustic projector, electronics for underwater acoustic signals recording
and amplifier for transmission signals, a weather station, GPS and a 360° camera.
The LMAIR system can be considered as an experimental laboratory at sea, available 24/7/365 for many research applications
like maritime surveillance, passive acoustic monitoring, underwater acoustic communication, positioning and tomography.

Postdoc
Affiliation: France, ENIB, ENSTA-Bretagne
Modelling, Optimisation, and Design of a New Reconfigurable Magnetic Coupling Thruster for Underwater Robots
The use of reconfigurable thrusters on the development of new AUV architecture has grown up in the last years. With this type of thruster, it is possible to design underwater robots with changeable thruster architectures. This work shows the development process of a new propulsion system for submarine vehicles (robots), which can guarantee complete water-tightness, greater manoeuvrability, and better efficiency. The perfect water-tightness is ensured using magnetic couplings, which allow the torque transmission to the outside of the robot, without having holes and mechanical seals on its hull. Greater manoeuvrability is achieved through the reconfigurable propulsion system, which allows the propeller reorientation, thus ensuring more degrees of freedom per each thruster, which reduces the total number of required thrusters to drive and steer the vehicle, thereby increasing its efficiency. This system is called reconfigurable magnetic coupling thruster (RMCT). To make it possible, innovative design is proposed with appropriate actuators, then it is modelled, optimised, detailed, fabricated and assembled. The new design is modelled parametrically considering its mechanical and magnetic behaviour, composing a digital prototype that is optimised. The parametric magnetic model uses the method that can be evaluated most quickly among the finite element method and the finite volume integration method. The optimisation process considers an evolutionary method, i.e. Genetic Algorithms. Finally, an optimal RMCT is achieved for the considered parameters. The executive project is carried out, fabricated (3D printed), and assembled.

PHD student
Affiliation: Université de Toulon, COSMER-IM2NP
Using Vortex Simulator to validate the control of a tethered ROV
Underwater cables are often used to link ROV to a control unit on the surface.
They transmit data in both directions, they can power supply the ROV and they provide a safety link to retrieve the ROV in case of failures.
However, when not managed properly, underwater cables have drawbacks: They induce drag force,
their inertia can slow down the ROV, they limit its workspace, they can get caught on something or drag on the seabed.
All of these reduce ROV maneuverability.
Our main objective is to actively manage the cable of a ROV in real time to limit hazards related to the environment.
The knowledge of the cable shape will then help us to estimate the ROV position.
This presentation will introduce a way to instrument the cable to observe its behavior and control it.
It will also describe in details the use of Vortex software to simulate the complete system
and to analyze its behavior under different controls.