This research team focusing on autonomous robotics for exploration is an authority in France in the field of marine environment observations. Their research is mainly established at ENSTA Bretagne where the specialism has developed steadily over the past 15 years. The team is part of the Lab-STICC / "AI & Oceans" Department.
Objectives and applications: design intelligent, autonomous robots for exploring the environment – particularly the marine environment
Mobile robotics has grown significantly, usually in structured and already mapped environments. In other situations – unknown and unstructured environments – such as distant planets, volcanoes, deep caves, irradiated areas, underground water veins, burning buildings or the sea depths – the nature of robotics changes.
Because it is difficult for humans to intervene safely in these circumstances, where remote operation is usually no longer possible, robotics becomes essential. Robots must therefore be equipped with maximum autonomy and intelligence to accomplish a mission. This is called "exploratory robotics", as the robot has to map its environment, make decisions, locate itself and be able to return home.
Research areas: design methodological tools of autonomous robotics for exploration
The ROBEX team seeks to develop methodological tools for designing intelligent algorithms which enable robots to accomplish an exploratory mission autonomously. Bearing certain hypotheses about the environment and dynamics of the robot in mind, the team endeavors to guarantee such properties as:
- avoidance of a forbidden zone,
- compliance with constraints on the state of the system,
- integrity of the location
- and the ability to return to the starting point.
The team strives to take any type of uncertainty into rigorous account, obtain theoretically elegant solutions and make convincing experimental validations.
Methodological Tools
The emphasis is on:
- set theory,
- abstract interpretation,
- nonlinear robot control and Bayesian filtering.
Collaborations
- Companies: Kopadia, Thales, Forssea, RT-sys, iXblue, ECA-robotics, Subsea-Tech, Orange-Labs, Pilgrim, Texys Marine, Oxxius.
- Institutions: DGA, DRASSM, Ifremer, EDF, Brittany Region, Shom.
- Laboratories: LIRMM, IRISA, Polytechnique, LS2N.
- Research networks: GDR Macs and GDR robotique.
Examples of research papers and applications
Drifting robots
Design drifting robots capable of traveling very long distances in the ocean using ocean currents as a means of propulsion.
Thomas Le Mezo’s thesis, defended in 2019 and awarded the DGA 2021 thesis prize, has paved the way to the development of the first prototypes in this area.
Find out more:
Towed magnetometer for underwater archeology using robotics
The subject of Joris Tillet’s thesis (he won a DGA and Brittany Region grant), defended in 2021, bore on "Safe Localization and Control of a Towed Sensor"
# Keywords: underwater location, nonlinear control, interval analysis, fuzzy logic, fuzzy comprehensive evaluation, towed sensor.
This thesis contributes to technological progress in underwater archeology using robotics, not least in the search for wrecks. It has benefited from the research conducted by the Department of Underwater Archeological Research (DRASSM) to find La Cordelière, which sank off the Brest coast in 1512 and whose artillery battery is still buried, somewhere, beneath the sediments.
The robotic system proposed entails towing a magnetometer likely to detect the ferromagnetic materials of the wreck. The sensor cannot be embedded directly as it is sensitive to the disruptions of the robot. This is why it is offset via a cable and towed by the drone.
Two problems are studied in this context.
- The first is associated with control of the magnetometer’s position when it is only possible to act on the towing robot. A feedback linearization method is therefore used to build a controller. This controller is then validated under certain state constraints using interval analysis tools.
- The second problem concerns reliable localization underwater. The means for grasping the uncertainties and outliers collected by an acoustic sensor are therefore studied.
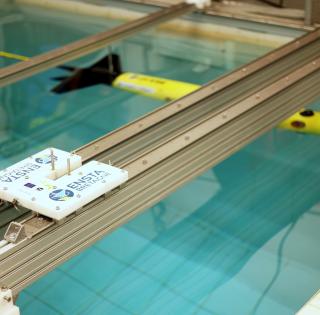
Initial findings can be obtained thanks to interval analysis, and fuzzy logic rounds off the approach by providing more flexibility in the prioritization of constraints. Finally, trials are presented with various robots, especially localization of an ROV in a pool.
Inspection and maintenance of offshore installations
Subject of the thesis by Auguste Bourgeois (Cifre Forssea Robotics) defended in 2021: “Safe & collaborative autonomous docking of a robot on a mobile platform”
# Keywords: underwater docking, stability of dynamic systems, hybrid systems, constraint programming, guaranteed integration
Given the increasing number of offshore facilities, there is a need for reliable autonomous robots which can perform inspection and maintenance missions, while keeping operational expenses down. To decrease the likelihood of an accident during a mission, mathematical tools can be used to demonstrate, a priori, its feasibility. In this thesis, new methods based on a set-membership approach are presented in this regard.
- First, we propose a new method for analyzing the stability of an uncertain discrete, continuous or hybrid system.
- Next, we present an approach drawing inspiration from reachability analysis, for which we have developed a new constraint programming tool for implementing differential constraints.
- Both these approaches can be used to predict a robot’s behavior before it is even deployed.
- These tools are illustrated by realistic examples from the fields of localization and control, applied to the problem of underwater docking. Moreover, the Computer-Assisted Proofs in Dynamics (CAPD) library is presented in a robotics context via practical examples.
Underwater exploratory robot: a sonar as the only exteroceptive sensor
Design and produce an underwater robot able to explore its environment alone, without surfacing to collect GPS, with a sonar as the only exteroceptive sensor.
Autonomous exploration using an echo-sounder
In an underwater environment, perform isobath tracking in order to explore and come back, with a simple echo-sounder.
Group of robots
Perform the capture of a robot by several robots in an uncertain and unstructured environment.
Prof. Luc Jaulin, research professor at ENSTA Bretagne / Lab-STICC in robotics for exploration:
We seek to represent and propagate uncertainties as rigorously as possible without making uncontrolled approximations, such as those induced by linearization or discretization. Uncertain variables may be the environment map, sensor data, robot trajectory, past or future decision making, robot dynamics and human interventions. The modeling of these different types of uncertainty requires reflection and the development of tools capable of meeting our objectives.
contact
Luc Jaulin
Full professor
IT Departement
Lab-STICC Laboratory / AI & Ocean Department / Robex Team
+33 (0)2 98 34 89 10











news