La campagne pour retrouver l'épave de la Cordelière, navire mythique coulé au large de Brest, est lancée. Le navire d'exploration archéologique du DRASSM (Département des recherches subaquatiques et sous-marines), l'André Malraux, et son équipage, sont établis à Brest du 25 juin au 13 juillet 2018. Les équipes robotique et détection acoustique ENSTA Bretagne sont mobilisées à leurs côtés avec le boatbot : un zodiac autonome.
Les recherches pour retrouver l'épave de la Cordelière stimulent la créativité des roboticiens ENSTA Bretagne
Un peu d'histoire... Le 10 août 1512, le navire de la Duchesse Anne "la Cordelière" échoue en pointe du Finistère, au large de la pointe Saint Mathieu, avec "le Régent", navire anglais du roi Henri VIII, suite à une intense et meurtrière bataille réunissant une cinquantaine de navires. Malgré les campagnes archéologiques conduites dans les années 90, ces épaves n'ont pas encore pu être retrouvées.
Une nouvelle campagne de fouilles portée par le DRASSM (Département des recherches subaquatiques et sous-marines) et le Conseil Régional de Bretagne a été initiée pour 3 ans, à laquelle participe l'ENSTA Bretagne. Après plusieurs mois de préparation, les recherches en mer ont débuté lundi 25 juin, pour 3 semaines, avec des moyens technologiques beaucoup plus performants que ceux utilisés il y a 20 ans. Le DRASSM et la région Bretagne comptent aussi sur un ensemble de partenaires scientifiques, qui apportent des expertises complémentaires : ENSTA Bretagne (détection acoustique par systèmes autonomes), UBS (archives), LIRMM (identification de cibles par robots téléguidés), SHOM (données bathymétriques), Ifremer/UBO (études géomorphologiques), iXBlue (détection électronique) et Ecrans du monde (la Bretagne maritime à l’époque de la duchesse Anne).
ENSTA Bretagne contribue avec un dispositif d'archéo-robotique inédit, baptisé « Boatbot ». Il s’agit d’un zodiac autonome, conçu et réalisé par les élèves ingénieurs en robotique (promotion 2018). Equipé d’un sondeur de sédiments, le Boatbot ENSTA Bretagne est capable de scanner avec finesse le fond marin sur 50 cm à 3 mètres d’épaisseur, dans les zones les plus rocheuses où le navire du DRASSM, l’André Malraux, ne peut approcher.
Le zodiac autonome Boatbot complète les moyens technologiques de pointe du DRASSM, rassemblés sur l'André Malraux et coordonnés par Olivia Hulot. Il permet d'approcher les nombreuses roches présentes. Michel L’Hour, archéologue et directeur du DRASSM, a intensifié les recherches documentaires ces dernières années et relevé quelques indices qui invitent à explorer la zone située entre l’entrée de la rade de Brest (le goulet) et le fort de Bertheaume. De plus, sur une enluminure, un artiste du 16e siècle semble avoir placé des roches près du lieu de naufrage. Ce qui incite à explorer les fonds au plus près de la côte, à l’aide du Boatbot.
Boatbot a vu le jour grâce au financement de la région Bretagne, dans le cadre de l’appel à projet NEPTUNE pour soutenir l’archéologie sous-marine. Au-delà des recherches pour retrouver la Cordelière, cette campagne a également favorisé l’émergence de nouveaux programmes de recherche. Deux thèses en archéo-robotique vont débuter à l’ENSTA Bretagne, l’une financée par la région Bretagne et la Direction générale de l’armement, l’autre par l’entreprise Copadia.
Boatbot : un zodiac robotisé et autonome pour quadriller une zone de 5 km² en 3 semaines et explorer la couche de sédiments qui cache peut-être l'épave de la Cordelière...
En parallèle des explorations à bord du Malraux, pendant 3 semaines, Boatbot quadrille une zone de 5 km2, proche de la côte, où les courants sont très forts. Du fait de ces contraintes, un zodiac autonome s’est avéré le plus pertinent : nécessité d'un moteur thermique pour tenir les trajectoires enregistrées et embarcation adaptée aux faibles fonds, où le Malraux ne peut pas intervenir.
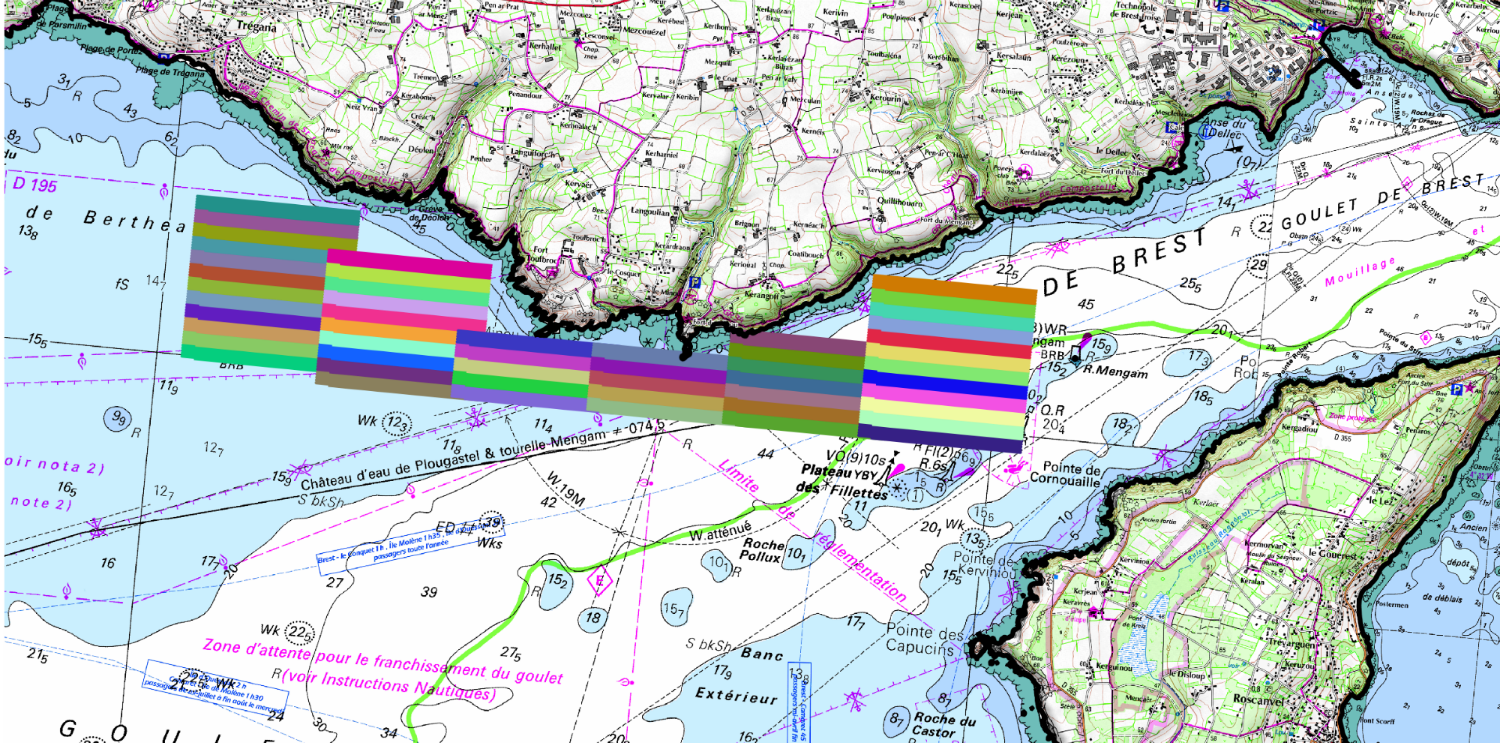
La zone de 5,2 km² à explorer a été découpée en 52 secteurs rectangulaires identiques (des « briques » en langage de roboticien) de 1km de long par 100 mètres de large (cf. photo ci-dessous). Le fond marin de chacun de ces 52 secteurs va être tour à tour scanné, de manière parfaitement autonome.
Tout en contribuant aux recherches de la Cordelière, l’équipe robotique ENSTA Bretagne met en œuvre un démonstrateur inédit d’archéo-robotique, imaginé, conçu et programmé par les étudiants, encadrés par une équipe de recherche de rang mondial. Luc Jaulin, enseignant chercheur responsable des enseignements en robotique à l’ENSTA Bretagne et des recherches en robotique marine autonome : "Nous allons démontrer la faisabilité de confier des missions pénibles, car longues et ennuyeuses, à des robots autonomes pour amplifier les capacités de recherche archéologique. On peut tout à fait imaginer que dans un avenir proche, le navire du DRASSM soit équipé de plusieurs robots autonomes de ce type, pour sonder des surfaces plus étendues et plus proches des roches et des ilots, tout en permettant au DRASSM de maîtriser la durée et le coût des campagnes."
Le résultat de 6 mois de travail avec les élèves ingénieurs qui se spécialisent en robotique
Les mises en situation et la conduite de projets d'application complets et innovants constituent des objectifs pédagogiques majeurs à l'ENSTA Bretagne, pour former des ingénieurs à la fois généralistes et immédiatement opérationnels dans le domaine d'expertise choisi. 2 projets longs sont proposés aux futurs ingénieurs en robotique, pendant leur dernier semestre de formation sur le campus brestois :
- la réalisation et le test de robots autonomes pour explorer le lac de Guerlédan et croiser robotique marine autonome et hydrographie
- le projet d’archéo-robotique pour retrouver l'épave de la Cordelière, autre cadre particulièrement stimulant pour mener de A à Z un projet de conception robotique et imaginer le meilleur système robotique pour remplir cette mission.
Cet ambitieux projet de conception robotique a débuté le 18 octobre 2017 pour les 30 étudiants en robotique de la promotion 2018. Ils ont rencontré des archéologues, historiens, géologues et représentants du Conseil régional de Bretagne afin d'appréhender le projet. Quelques semaines plus tard, ils ont découvert les contours de la zone géographique à explorer. Pendant 5 mois, ils ont travaillé ensemble, découpé le projet en plusieurs axes d'étude et modélisé 2 systèmes robotisés autonomes : un drone sous-marin autonome et le zodiac autonome Boatbot, en ayant soin de prendre en compte tous les paramètres de cette mission d'archéo-robotique.
Finalisé par l’équipe de recherche en robotique, le zodiac autonome a été testé sur 1 km² en mai 2018 lors du sub-meeting organisé par Luc Jaulin et navigue en parfaite autonomie, du 25 juin au 13 juillet, non loin de l'équipage du DRASSM.
Exemples d'axes d'étude pour la conception du Boatbot par les étudiants
- Histoire de la Cordelière, description du navire, pour déterminer le quadrillage et les capteurs adaptés à la détection d’une épave enfouie depuis 500 ans dans les sédiments (magnétomètre, sonars, sondeur de sédiment)
- Choix du robot : surface ou sous-marin, les 2 solutions ont été proposées et ont leurs avantages propres
- Planification d'une trajectoire
- Localisation, en croisant les données acquises par le Boatbot avec un modèle numérique de terrain du SHOM (cartographie du fond marin) qu’il faut compléter, …