Olivier Ménage, Patrick Rousseau, Fabrice Le Bars, Luc Jaulin, etc.
Vaimos
The sailboat robot VAIMOS
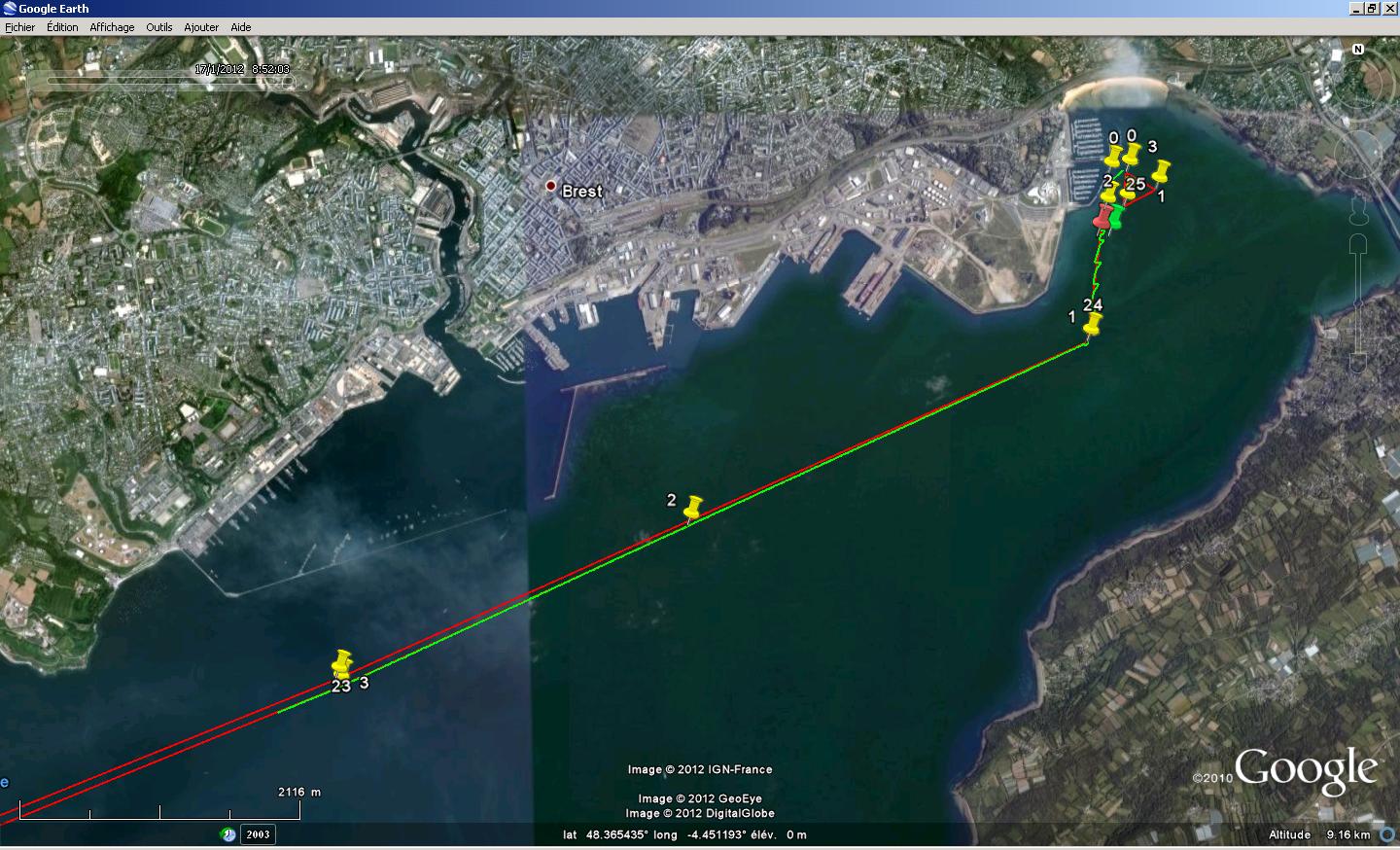
"Voilier Autonome Instrumenté de Mesures Océanographiques de Surface" has tried to perform a mission of more than 100 miles.
between Brest and Douarnenez.
The departure date was Tuesday, January 17, 8am.
See the site associated with Vaimos:
TBO, TV report, departure of the mission
Planning of the mission
Ifremer bulletin related to this mission:
Planned mission
To see all logfiles of a mission, you should first download the Dashboard (for windows).
Presentation of the Dashboard
Download a logfile generated by the simulator two
days before the mission. Our simulator uses Hardware-in-the-loop simulation.
The logfile were regularly downloaded from Vaimos toward a PC located on the boat we use for supervision
(la Marloux). Note that since the mission has not started
yet, the only logfile available is that of the simulator. I also
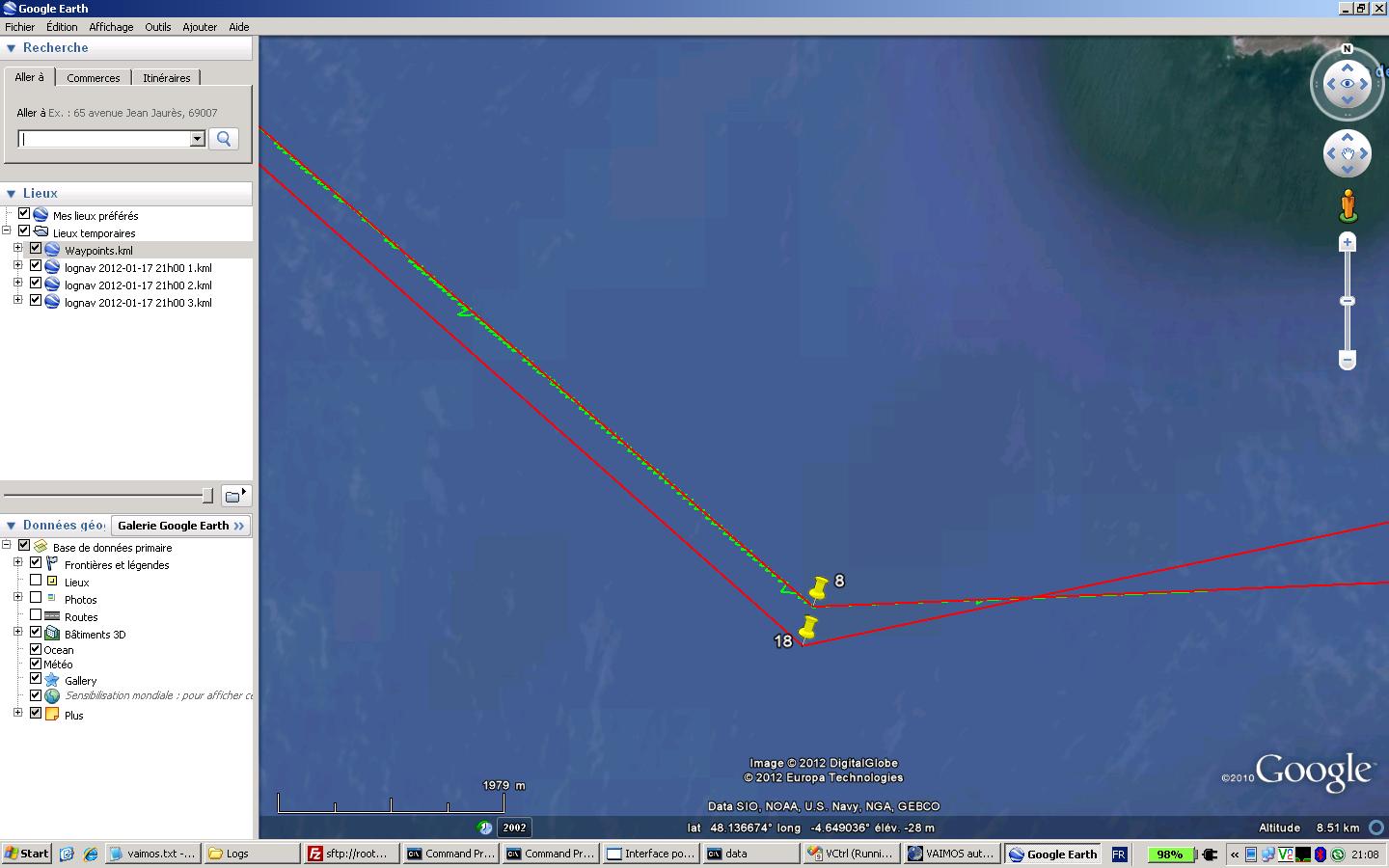
posted some jpg images that show the evolution of the trip.
All the following files should be renamed into data.txt and be inserted in the
dashboard folder to visualize all data with graphics.
Google Earth file. Logfile.
At around 3am, we had a problem with a strap inside the motor of la Marloux (supervision boat).
Moreover taking into account the fact that
(1) the tuning of the sail is not as efficient as it used to be,
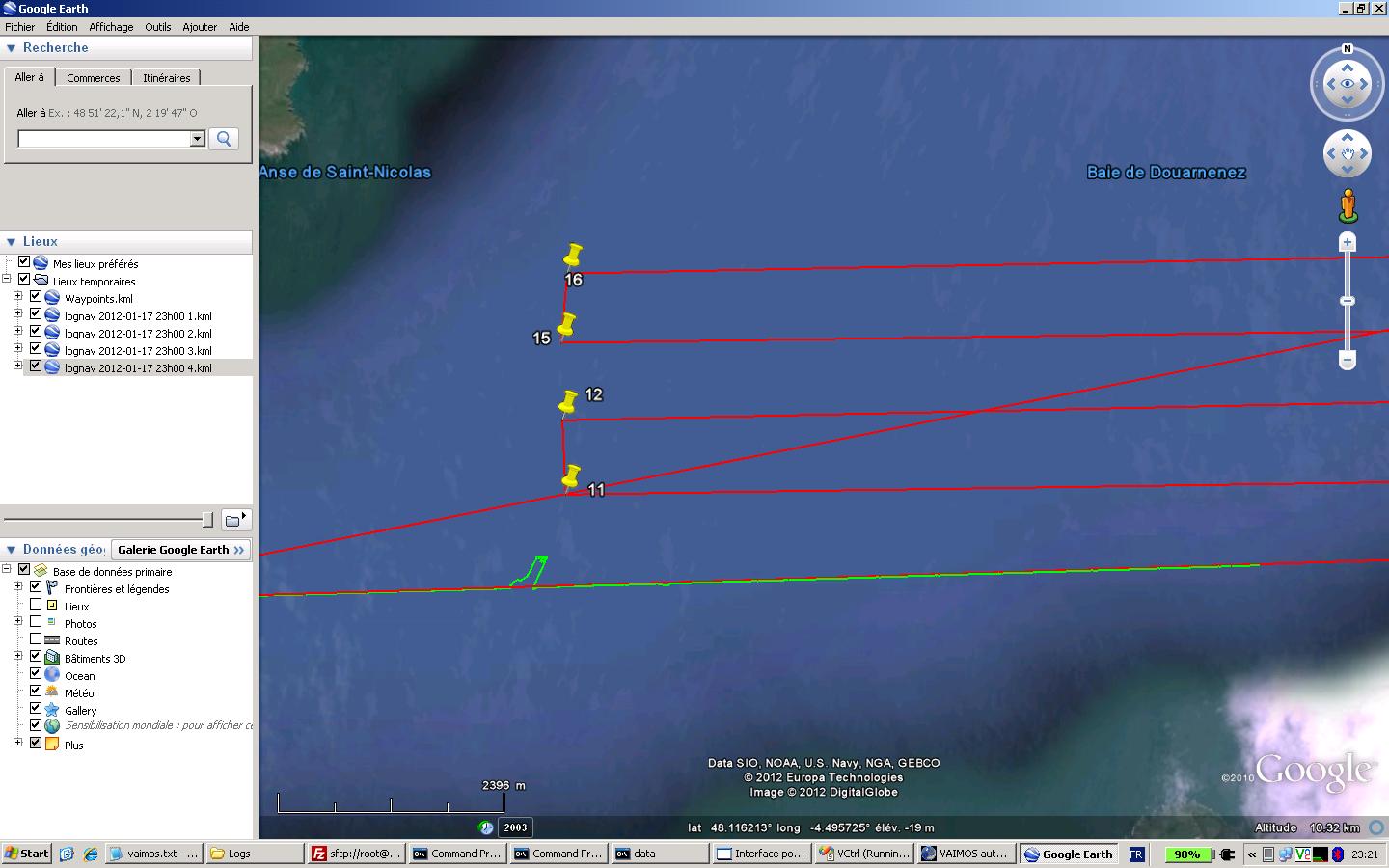
(2) there exists some traffic in the Baie de Douarnenez and with the night,
the survey of the mission is not easy,
(3) and we have already done of 105km,
we decided to take no risk and to stop the mission.