MICROTRANSAT ENSIETA-ECOLE NAVALE-IFREMER
1) Historique
3) Optimouse
7) Simulateurs
8) Liens
L'idée d'un robot voilier en commencé à m'intéresser en 2003 (voir article CIFA, thèse Dao, thèse Herrero) car c'est un exemple de robot qui peut être autonome en énergie. Tout comme les robots planeurs, ils recherchent leur énergie de propulsion dans leur environnement. J'ai réellement entrepris d'en construire un après avoir présidé la microtransat 2006 (voir la remise de la coupe) qui s'est tenue en France près de Toulouse après discussions avec Yves Brière. Après une rencontre avec l'école navale avec Frédéric Hauville et Patrick Bot, nous avons décidé de nous lancer dans la fabrication d'un robot voilier en commun pour effectuer la traversée de l'Atlantique dans le cadre du challenge microtransat. Nous avons réussi à convaincre nos tutelles qui ont alors financé le projet. L'ENSIETA devait s'occuper de l'électronique et du contrôle et l'Ecole navale devait s'occuper de la partie mécanique. Côté ENSIETA, nous avons formé une équipe avec enseignants (Kostia Roncin (archi-nav), Benoît Clément (automatique), Yvon Gallou (électronique), Bruno Aizier (grosse expérience dans la fabrication de voilier), Olivier Reynet (logiciel), Luc Jaulin (robotique)), des doctorants (Jan Sliwka (robotique), Fabrice Le Bars (informatique)) et des étudiants (Richard Leloup (mécanique), Pierre Henri Reilhac (électronique), Henry de Mallet (électronique)). Nous avons aboutit à un robot nommé Breizh Spirit (voir Jan Sliwka pour une explication sur le nom). Puis à Optimousse. Un étudiant de l'ENSIETA (Olivier Ménage, FIPA) qui a suivi le projet développe aussi un robot voilier à IFREMER.
{kind=link}
Breizh Spirit est le nom du premier voilier de l'ENSTA-Bretagne. Il a été conçu et fabriqué par des étudiants et doctorants de l'école.
Article de l'ENSIETA pour la microtransat 2009 Voir le site du concours 2009 pour plus d'infos.
Rapport de Pierre-Henry Reihac (étudiant qui a conçu l'électronique et les algos de commande).
Tests au lac (St Renan) : Photos zipÂ
Portugal
Film youtube du concours au Portugal.
Traversée de la rade
Film 0 youtube (vérification sur le lac de St Renan)
Film 1 youtube. Film 2 youtube. Pour plus d'infos.
Article du télégramme de Brest
{kind=link}
Tour de Ouessant
La première tentative a été un échec. Le bateau a relativement bien navigué pendant une quinzaine d'heures.
Mais le mat, déjà fragile, s'est cassé à sa base et le bateau s'est peu à peu rempli d'eau.
Heureusement il a été repêché, par Erell Pellé 24 heures après son départ. Pour la deuxième tentative c'est à nouveau un échec. Mais nous avons de belles vidéos.
Scission
Les mécaniciens ont alors pris la décision de jouer cavalier seul. Ils ont gagné le trophée poséidon sur le travail que nous avions réalisé ensemble. Bravo à eux, mais bon, on avait quand même initié le projet, conçu les algos de commande et l'architecture électronique. Suite à cette scission, le responsable de Breizh Spirit est désormais Yvon Gallou qui a travaillé presque tout seul à la fiabilisation du robot.
First attempt
La première tentative de la traversée de l'atlantique a été faite fin septembre 2011 pour BS2. Il semble que le bateau n'ait pas été en direction de son premier waypoint. De plus en moins de 24h, le foc a lâché, le servo-moteur du gouvernail a pris l'eau, les batteries se sont vidées anormalement, les panneaux solaires ont été détruits par l'eau salée (problème d'étanchéité), une écoute est sortie de sa poulie. Toutes ces défaillances ont empêché le robot de suivre sa mission. Il n'a pas franchi la ligne de départ mais a montré de bonnes performances (comme le montre les messages spot envoyés toutes les 8 heures). Dommage qu'il n'existe pas de log files pour analyser en détail ce qu'il s'est réellement passé.
{kind=link}
Second (and last) attempt
During the second attempt, the performances are similar compared to the
first attempt. The only information we got is at the following link http://www.microtransat.org/tracking.php. Several scenarios
could be imagined. An optimistic scenario could be that the three first
waypoints have been validated and the start line has been crossed. The robot
has been found two weeks later aground on the
Suite à la scission, nous n'avions plus de plateforme (ni même l'électronique). Des étudiants électroniciens (Rémi, François et Jérémy) encadrés par (Benoit Clément et moi-même) ont donc conçu et fabriqué un nouveau robot voilier, avec une nouvelle architecture électronique utilisant une carte Arduino. Cette nouvelle architecture est plus facile à dupliquer et à modifier que l'ancienne. Notons que cette architecture est aussi utilisée pour les robots planeurs aériens, robots buggys et foilers que nous développons aussi à l'école. L'originalité de l'Optimousse est que la voile n'est pas réglable et qu'il ne dispose pas de capteur de vent (ses seuls capteurs sont le GPS et la boussole). Ces handicaps sont compensés par plus d'intelligence (ou des algos de commande plus élaborés), plus de robustesse (les capteurs de vent sur étagère ne peuvent pas être considérés comme fiables dans un tel contexte) et un faible coût de la plateforme (l'Optimousse peut être entièrement reproduit à l'ENSTA-Bretagne en moins d'une semaine et pour un coût de moins de 1000 euros).
Lire le rapport de Rémi et François qui ont conçu et fabriqué le robot.
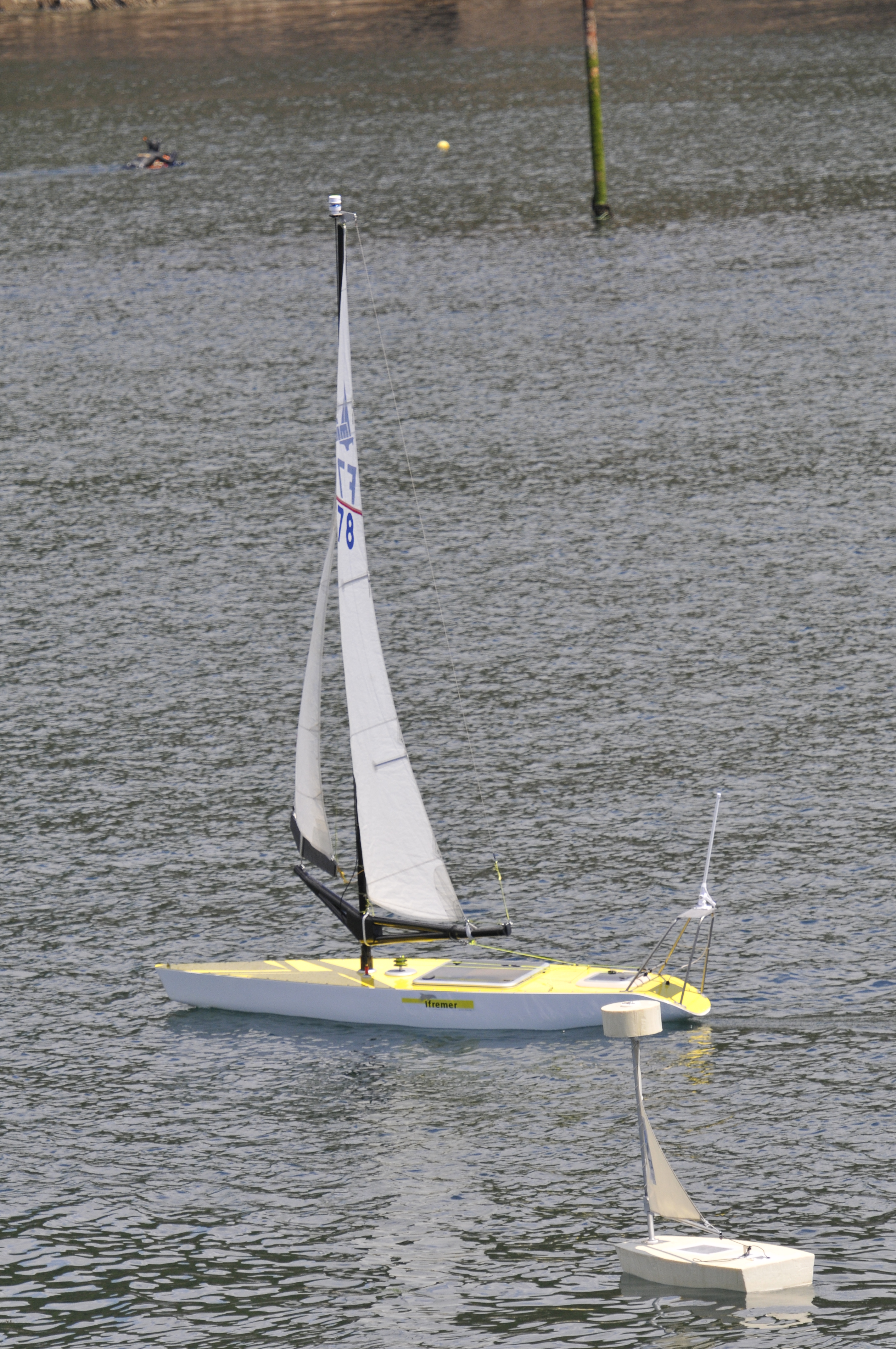
Voir une photo d'Optimousse (le petit) avec le robot Vaimos (le grand).
{kind=link}
L'école navale (Frédéric Hauville (responsable), Matthieu Sacher (stagiaire), Clément Aubry (doctorant en robotique)) a réussi à construire une plateforme mécanique robuste. Nous devions leur construire leur électronique. Ils ont dû se débrouiller seul (je sais, c'est pas terrible, mais bon, les relations sont toujours excellentes). Nous les avons quand même un peu aidés puisqu'ils ont repris notre nouvelle architecture électronique (celle avec la carte Arduino) et nos nouveaux algos de commande (ceux de l'Optimousse)), mais ils ont su les compléter et les adapter à leur bateau. Maintenant, leur robot navigue en autonomie et sans capteur de vent et est capable de faire un circuit complet à partir de waypoints devant des visiteurs. Le fait de pouvoir faire une manip avec des log-files et devant des visiteurs est à mon sens indispensable pour valider une manip en robotique (des vidéos ne suffisent pas !).
Voir photo.
{kind=link}
Olivier Ménage, alors qu'il était étudiant à l'ENSTA-Bretagne a convaincu sa tutelle IFREMER d'en construire un pour faire de la mesure en mer. Dans le cadre de son PFE, il a construit (avec d'autres ingénieurs d'IFREMER et sous la responsabilité de Thierry Terre) un bateau complet en moins de quatre mois. Le résultat est impressionnant (voir http://youtu.be/OkEcEAFhsO8, Vidéo plus longue, WebTV). A la fois, pour l'architecture mécanique et électronique, ils se sont débrouillés seuls. C'est à mon sens le robot voilier le plus abouti que j'ai pu voir. C'est sur les algos de commande et sur l'architecture logicielle que nous les aidons. Ce dernier point montre qu'un des points forts de l'école réside dans la robotique assez mal connue du monde marin. Notons enfin que les algorithmes ont été implémentés sur une carte Armadeus avec une architecture logicielle développée par Olivier Reynet dans le cadre des enseignements en 1ere année.Â
Afin de valider les algorithmes de commande et de navigation, nous avons développé pas loin de 10 simulateurs pour robots voiliers.
Voir par exemple
- un premier simulateur 3D (qui date de 2004) qui fonctionne sous C++ builder
- un deuxième simulateur 3D (de 2007) fonctionnant aussi sous Builder et (presque) le même fonctionnant sous Visual (avec le rapport).
- Simulateur de Patrick Sittaramane (de loin de plus abouti avec retour d'effort sur la voile et le gouvernail).
- quelques Simulateurs 2DÂ fonctionnant sous Scilab, chacun devant valider une conception ou une stratégie précise.
- le simulateur pour le suivi de ligne avec les codes sources sous QT avec visu 3D.
Avant d'implémenter les algos sur les voiliers, nous les testons systématiquement sur simulateurs puis sur des robots buggy, sur le terrain de foot de l'ENSTA-Bretagne.
Plateformes intéressantes sur le site https://www.modelsailboat.com/tcl.html
Blog de Jérémy Nicola : http://code.google.com/p/brest-sailboats-robotics/
Polycopié sur le principe de la commande
Blog associé au projet Foiler réalisé pat Marc L'Emaillet et Brieg Thiery.
Come back to http://www.ensta-bretagne.fr/jaulin/